





















ZD-230M5二相混合式步進電機細分驅動器
企業信息


同類優質產品
更多+
產品分類


產品新聞
產品介紹
概述:
ZD-230M5驅動器驅動二相混合式步進電機,該驅動器采用原裝進口模塊,實現高頻斬波,恒流驅動,具有很強的抗干擾性、高頻性能好、起動頻率高、控制信號與內部信號實現光電隔離、電流可選、結構簡單、運行平穩、可靠性好、噪聲小,帶動3.0A以下所有的42BYG、57BYG系列電機二相混合式步進電機。
自投放市場以來,深受用戶歡迎,特別是在舞臺燈光、自動化、儀表、POS機、雕刻機、票據打印機、工業標記打印機、半導體擴散爐、包裝機械等領域得到廣泛應用。
ZD-230M5驅動器特點:
1每相最大驅動器電流為3.0安培,且電流八檔可調。
2采用無過流專利技術。
3采用國外進口電力電子元器件。
4可選擇電流半流。
5細分數可選(1/2,1/5,1/10,1/20,1/40)。
6所有輸入信號都經過光電隔離。
7電機的相電流為正弦波。
■ 驅動器接線示意圖:
 ■ 技術規格:
1供電電源:直流(24-40V)。
2驅動器適配電機: 42BYG、57BYG系列。
3驅動電流:根據不同電機,調節驅動器使輸出電流與電機相匹配,如果電機能夠拖動負載可以調節小于電機額定電流,但不能調節大于電機額定電流 。
4驅動方法:細分斬波。
■ 細分數及相電流設定:
本驅動器是用驅動器上的拔盤開關來設定細分數及相電流的,根據面板的標注設定即可;請您在控制器頻率允許的情況下,盡量選用高細分數;具體設置方法請參考下表:
拔盤設置:
■ 技術規格:
1供電電源:直流(24-40V)。
2驅動器適配電機: 42BYG、57BYG系列。
3驅動電流:根據不同電機,調節驅動器使輸出電流與電機相匹配,如果電機能夠拖動負載可以調節小于電機額定電流,但不能調節大于電機額定電流 。
4驅動方法:細分斬波。
■ 細分數及相電流設定:
本驅動器是用驅動器上的拔盤開關來設定細分數及相電流的,根據面板的標注設定即可;請您在控制器頻率允許的情況下,盡量選用高細分數;具體設置方法請參考下表:
拔盤設置:
 ■ 控制信號輸入連接圖:
本驅動器的輸入信號共有三路,它們是:步進脈沖信號 CP、方向電平信號DIR、脫機信號FREE。它們在驅動器內部分別通過270歐的限流電阻接入光耦的負輸入端,且電路形式完全相同。OPTO端為三路信號的公共正端(三路光耦的正輸入端),三路輸入信號在驅動器內部接成共陽方式,所以OPTO端須接外部系統的VCC,如果VCC是+5V則可直接接入;如果VCC不是+5V則須外部另加限流電阻R,保證給驅動器內部光耦提供8-15mA的驅動電流,參見下圖.
■ 控制信號輸入連接圖:
本驅動器的輸入信號共有三路,它們是:步進脈沖信號 CP、方向電平信號DIR、脫機信號FREE。它們在驅動器內部分別通過270歐的限流電阻接入光耦的負輸入端,且電路形式完全相同。OPTO端為三路信號的公共正端(三路光耦的正輸入端),三路輸入信號在驅動器內部接成共陽方式,所以OPTO端須接外部系統的VCC,如果VCC是+5V則可直接接入;如果VCC不是+5V則須外部另加限流電阻R,保證給驅動器內部光耦提供8-15mA的驅動電流,參見下圖.
 如果輸入電壓超過 5V,請參照表1,加裝外接電阻R限流。
如果輸入電壓超過 5V,請參照表1,加裝外接電阻R限流。
 表1
1 步進脈沖信號CP
步進脈沖信號CP用于控制步進電機的位置和速度,也就是說:驅動器每接受一個CP脈沖就驅動步進電機旋轉一個步距角(細分時為一個細分步距角),CP脈沖的頻率改變則同時使步進電機的轉速改變,控制CP脈沖的個數,則可以使步進電機精確定位。這樣就可以很方便的達到步進電機調速和定位的目的。本驅動器的CP信號為低電平有效,要求CP信號的驅動電流為8-15mA,對CP的脈沖寬度也有一定的要求,一般不小于5μS(參見下圖)。
表1
1 步進脈沖信號CP
步進脈沖信號CP用于控制步進電機的位置和速度,也就是說:驅動器每接受一個CP脈沖就驅動步進電機旋轉一個步距角(細分時為一個細分步距角),CP脈沖的頻率改變則同時使步進電機的轉速改變,控制CP脈沖的個數,則可以使步進電機精確定位。這樣就可以很方便的達到步進電機調速和定位的目的。本驅動器的CP信號為低電平有效,要求CP信號的驅動電流為8-15mA,對CP的脈沖寬度也有一定的要求,一般不小于5μS(參見下圖)。
 2 方向電平信號DIR
方向電平信號DIR用于控制步進電機的旋轉方向。此端為高電平時,電機一個轉向;此端為低電平時,電機為另一個轉向。電機換向必須在電機停止后再進行,并且換向信號一定要在前一個方向的最后一個CP脈沖結束后以及下一個方向的第一個CP脈沖前發出(參見下圖)。
2 方向電平信號DIR
方向電平信號DIR用于控制步進電機的旋轉方向。此端為高電平時,電機一個轉向;此端為低電平時,電機為另一個轉向。電機換向必須在電機停止后再進行,并且換向信號一定要在前一個方向的最后一個CP脈沖結束后以及下一個方向的第一個CP脈沖前發出(參見下圖)。
 3 脫機電平信號FREE
當驅動器上電后,步進電機處于鎖定狀態(未施加CP脈沖時)或運行狀態(施加CP脈沖時),但用戶想手動調整電機而又不想關閉驅動器電源,怎么辦呢?這時可以用到此信號。當此信號起作用時(低電平有效),電機處于自由無力矩狀態;當此信號為高電平或懸空不接時,取消脫機狀態。此信號用戶可選用,如果不需要此功能,此端不接即可。
4 輸入信號驅動電路設計指南
有的用戶提出我的控制系統驅動不了驅動器,這主要是驅動電流不夠或極性不對,常用的正確驅動電路見下圖。
3 脫機電平信號FREE
當驅動器上電后,步進電機處于鎖定狀態(未施加CP脈沖時)或運行狀態(施加CP脈沖時),但用戶想手動調整電機而又不想關閉驅動器電源,怎么辦呢?這時可以用到此信號。當此信號起作用時(低電平有效),電機處于自由無力矩狀態;當此信號為高電平或懸空不接時,取消脫機狀態。此信號用戶可選用,如果不需要此功能,此端不接即可。
4 輸入信號驅動電路設計指南
有的用戶提出我的控制系統驅動不了驅動器,這主要是驅動電流不夠或極性不對,常用的正確驅動電路見下圖。
 5控制系統共陰輸出與共陽方式驅動器連接圖:
5控制系統共陰輸出與共陽方式驅動器連接圖:
 6控制系統開集門方式輸出與共陽方式驅動連接圖:
6控制系統開集門方式輸出與共陽方式驅動連接圖:
 7西門子PLC(S7 CPU226),與共陽驅方式驅動器連接圖:
7西門子PLC(S7 CPU226),與共陽驅方式驅動器連接圖:
 ■ 電源說明:
ZD-230M5 型驅動器需要外部提供一組直流電源(注意正負極不要接錯),電源電壓范圍為DC(24-40)V;電源電流值根據電機相電流確定,一般選擇為不小于電機相電流(相同也行)。對于42型電機(如42BYG009、42BYGH101),選用DC24V;對于57型電機(如57BYG009、57BYG096、57BYG707),選擇為24V-40V之間,如果電機轉速較低,可以選擇為較低的電源電壓;如果電機轉速較高,可以選擇為較高的電源電壓。
■ 指示燈說明:
驅動器有二個指示燈:電源指示燈(綠色)、保護指示燈(紅色),驅動器加電后電源指示燈亮;如果驅動器發生保護動作,則保護指示燈亮(驅動器內部設有過流、過溫等保護電路)。
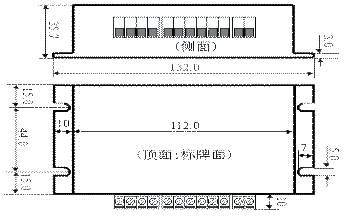
■ 外形尺寸:請參照下圖
■ 電源說明:
ZD-230M5 型驅動器需要外部提供一組直流電源(注意正負極不要接錯),電源電壓范圍為DC(24-40)V;電源電流值根據電機相電流確定,一般選擇為不小于電機相電流(相同也行)。對于42型電機(如42BYG009、42BYGH101),選用DC24V;對于57型電機(如57BYG009、57BYG096、57BYG707),選擇為24V-40V之間,如果電機轉速較低,可以選擇為較低的電源電壓;如果電機轉速較高,可以選擇為較高的電源電壓。
■ 指示燈說明:
驅動器有二個指示燈:電源指示燈(綠色)、保護指示燈(紅色),驅動器加電后電源指示燈亮;如果驅動器發生保護動作,則保護指示燈亮(驅動器內部設有過流、過溫等保護電路)。
■ 外形尺寸:請參照下圖
 ■ 常見問題解答:
1步進電機的運行方向和我要求的相反,怎樣調整?
可以改變控制系統的方向信號,也可以通過調整電機的接線來改變方向,具體如下:
對二相四線的電機,只需將其中一相的電機線交換接入驅動器即可,例如:把A+和A-交換。
2電機是二相四相六根和八根線的,而驅動器只要求接四根線,該怎樣使用?
四相混合式電機也稱二相混合式電機,只是四相電機的繞組引出線有多種接法,對于二相四根線電機,可以直接與驅動器相連對于四相六根線電機,中間抽頭的二根線懸空不接,其它四根線和驅動器相連,對于四相八根線電機,通常把繞組兩兩并聯后與驅動器相連。
3細分后電機的步距角如何計算?
對于兩相和四相電機,細分后的步矩角等于電機的整步步距角除以細分數,例如細分數設定為2驅動0.9度/1.8度電機,其細分步距角為1.8/2=0.9度;如細分數設定為8,驅動0.9度/1.8度電機,其細分步距角為1.8/8=0.225度。
4電機的噪音特別大;而且沒有力,電機本身在振動?
如遇到這種情況時,是因為步進電機工作在振蕩區,一般改變輸入信號頻率CP就可以解決此問題。
5電機在低速運行時正常,當是頻率略高一點就出現堵轉現象?
遇到這種情況多是因為加在驅動器的電源電壓不夠高引起的;把輸入電壓加高一些,就可以解決此問題,注意但不能高于驅動器電源端標注的最高電壓;否則會引起驅動器燒毀,如原來接的電源電壓是直流24V;現本可以把它接在36V。
6驅動器通電以后,電機在抖動;不能運轉?
遇到這種情況時,首先檢查電機的繞組與驅動器連接有沒有接錯;如沒有接錯再檢查輸入頻率CP是否太高;可以參照以下的8.7電機升降速設計簡介解決此問題;如不能解決可能因為驅動器燒毀,請與本公司聯系!
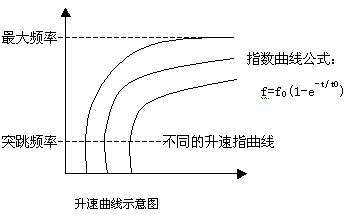
7升降速設計簡介:
步進電機速度控制是靠輸入的脈沖信號的變化來改變的,從理論上說,只需給驅動器脈沖信號即可,每給驅動器一個脈沖(CP),步進電機就旋轉一個步距角(細分時為一個細分步距角)但是實際上,如果脈沖CP信號變化太快,步進電機由于慣性將跟隨不上電信號的變化,這時會產生堵轉和丟步現象,所以步進電機在啟動時,必須有升速過程,在停止時必時有降速過程。一般來說升速和降速規律相同,以下為升速為例介紹:
升速過程由突跳頻率加升速曲線組成(降速過程反之)。突跳頻率是指步進電機在靜止狀態時突然施加的脈沖啟動頻率,此頻率不可太大,否則也會產生堵轉和丟步。升降速曲線一般為指數曲線或經過修調的指數曲線,當然也可采用直線或正弦曲線等。用戶需根據自己的負載
選擇合適的突跳頻率和升降速曲線,找到一條理想的曲線并不容易,一般需要多次‘試機’才行。指數曲線在實際軟件編程中比較麻煩,一般事先算好時間常數存貯在計算機存貯器內,工作過程中直接選取。
步進電機的升降速設計為控制軟件的主要工作量,其設計水平將直接影響電機運行的平穩性、升降速快慢、電機運行聲音、最高速度、定位精度(本公司產品在正確使用條件下,將保證其精度為100%)一種特例是:步進電機的運行速度不超過突跳頻率,這時將不存在升降速問題。
■ 常見問題解答:
1步進電機的運行方向和我要求的相反,怎樣調整?
可以改變控制系統的方向信號,也可以通過調整電機的接線來改變方向,具體如下:
對二相四線的電機,只需將其中一相的電機線交換接入驅動器即可,例如:把A+和A-交換。
2電機是二相四相六根和八根線的,而驅動器只要求接四根線,該怎樣使用?
四相混合式電機也稱二相混合式電機,只是四相電機的繞組引出線有多種接法,對于二相四根線電機,可以直接與驅動器相連對于四相六根線電機,中間抽頭的二根線懸空不接,其它四根線和驅動器相連,對于四相八根線電機,通常把繞組兩兩并聯后與驅動器相連。
3細分后電機的步距角如何計算?
對于兩相和四相電機,細分后的步矩角等于電機的整步步距角除以細分數,例如細分數設定為2驅動0.9度/1.8度電機,其細分步距角為1.8/2=0.9度;如細分數設定為8,驅動0.9度/1.8度電機,其細分步距角為1.8/8=0.225度。
4電機的噪音特別大;而且沒有力,電機本身在振動?
如遇到這種情況時,是因為步進電機工作在振蕩區,一般改變輸入信號頻率CP就可以解決此問題。
5電機在低速運行時正常,當是頻率略高一點就出現堵轉現象?
遇到這種情況多是因為加在驅動器的電源電壓不夠高引起的;把輸入電壓加高一些,就可以解決此問題,注意但不能高于驅動器電源端標注的最高電壓;否則會引起驅動器燒毀,如原來接的電源電壓是直流24V;現本可以把它接在36V。
6驅動器通電以后,電機在抖動;不能運轉?
遇到這種情況時,首先檢查電機的繞組與驅動器連接有沒有接錯;如沒有接錯再檢查輸入頻率CP是否太高;可以參照以下的8.7電機升降速設計簡介解決此問題;如不能解決可能因為驅動器燒毀,請與本公司聯系!
7升降速設計簡介:
步進電機速度控制是靠輸入的脈沖信號的變化來改變的,從理論上說,只需給驅動器脈沖信號即可,每給驅動器一個脈沖(CP),步進電機就旋轉一個步距角(細分時為一個細分步距角)但是實際上,如果脈沖CP信號變化太快,步進電機由于慣性將跟隨不上電信號的變化,這時會產生堵轉和丟步現象,所以步進電機在啟動時,必須有升速過程,在停止時必時有降速過程。一般來說升速和降速規律相同,以下為升速為例介紹:
升速過程由突跳頻率加升速曲線組成(降速過程反之)。突跳頻率是指步進電機在靜止狀態時突然施加的脈沖啟動頻率,此頻率不可太大,否則也會產生堵轉和丟步。升降速曲線一般為指數曲線或經過修調的指數曲線,當然也可采用直線或正弦曲線等。用戶需根據自己的負載
選擇合適的突跳頻率和升降速曲線,找到一條理想的曲線并不容易,一般需要多次‘試機’才行。指數曲線在實際軟件編程中比較麻煩,一般事先算好時間常數存貯在計算機存貯器內,工作過程中直接選取。
步進電機的升降速設計為控制軟件的主要工作量,其設計水平將直接影響電機運行的平穩性、升降速快慢、電機運行聲音、最高速度、定位精度(本公司產品在正確使用條件下,將保證其精度為100%)一種特例是:步進電機的運行速度不超過突跳頻率,這時將不存在升降速問題。

■ 技術規格:
1供電電源:直流(24-40V)。
2驅動器適配電機: 42BYG、57BYG系列。
3驅動電流:根據不同電機,調節驅動器使輸出電流與電機相匹配,如果電機能夠拖動負載可以調節小于電機額定電流,但不能調節大于電機額定電流 。
4驅動方法:細分斬波。
■ 細分數及相電流設定:
本驅動器是用驅動器上的拔盤開關來設定細分數及相電流的,根據面板的標注設定即可;請您在控制器頻率允許的情況下,盡量選用高細分數;具體設置方法請參考下表:
拔盤設置:
■ 控制信號輸入連接圖:
本驅動器的輸入信號共有三路,它們是:步進脈沖信號 CP、方向電平信號DIR、脫機信號FREE。它們在驅動器內部分別通過270歐的限流電阻接入光耦的負輸入端,且電路形式完全相同。OPTO端為三路信號的公共正端(三路光耦的正輸入端),三路輸入信號在驅動器內部接成共陽方式,所以OPTO端須接外部系統的VCC,如果VCC是+5V則可直接接入;如果VCC不是+5V則須外部另加限流電阻R,保證給驅動器內部光耦提供8-15mA的驅動電流,參見下圖.
如果輸入電壓超過 5V,請參照表1,加裝外接電阻R限流。
表1
1 步進脈沖信號CP
步進脈沖信號CP用于控制步進電機的位置和速度,也就是說:驅動器每接受一個CP脈沖就驅動步進電機旋轉一個步距角(細分時為一個細分步距角),CP脈沖的頻率改變則同時使步進電機的轉速改變,控制CP脈沖的個數,則可以使步進電機精確定位。這樣就可以很方便的達到步進電機調速和定位的目的。本驅動器的CP信號為低電平有效,要求CP信號的驅動電流為8-15mA,對CP的脈沖寬度也有一定的要求,一般不小于5μS(參見下圖)。
2 方向電平信號DIR
方向電平信號DIR用于控制步進電機的旋轉方向。此端為高電平時,電機一個轉向;此端為低電平時,電機為另一個轉向。電機換向必須在電機停止后再進行,并且換向信號一定要在前一個方向的最后一個CP脈沖結束后以及下一個方向的第一個CP脈沖前發出(參見下圖)。
3 脫機電平信號FREE
當驅動器上電后,步進電機處于鎖定狀態(未施加CP脈沖時)或運行狀態(施加CP脈沖時),但用戶想手動調整電機而又不想關閉驅動器電源,怎么辦呢?這時可以用到此信號。當此信號起作用時(低電平有效),電機處于自由無力矩狀態;當此信號為高電平或懸空不接時,取消脫機狀態。此信號用戶可選用,如果不需要此功能,此端不接即可。
4 輸入信號驅動電路設計指南
有的用戶提出我的控制系統驅動不了驅動器,這主要是驅動電流不夠或極性不對,常用的正確驅動電路見下圖。
5控制系統共陰輸出與共陽方式驅動器連接圖:
6控制系統開集門方式輸出與共陽方式驅動連接圖:
7西門子PLC(S7 CPU226),與共陽驅方式驅動器連接圖:
■ 電源說明:
ZD-230M5 型驅動器需要外部提供一組直流電源(注意正負極不要接錯),電源電壓范圍為DC(24-40)V;電源電流值根據電機相電流確定,一般選擇為不小于電機相電流(相同也行)。對于42型電機(如42BYG009、42BYGH101),選用DC24V;對于57型電機(如57BYG009、57BYG096、57BYG707),選擇為24V-40V之間,如果電機轉速較低,可以選擇為較低的電源電壓;如果電機轉速較高,可以選擇為較高的電源電壓。
■ 指示燈說明:
驅動器有二個指示燈:電源指示燈(綠色)、保護指示燈(紅色),驅動器加電后電源指示燈亮;如果驅動器發生保護動作,則保護指示燈亮(驅動器內部設有過流、過溫等保護電路)。
■ 外形尺寸:請參照下圖
■ 常見問題解答:
1步進電機的運行方向和我要求的相反,怎樣調整?
可以改變控制系統的方向信號,也可以通過調整電機的接線來改變方向,具體如下:
對二相四線的電機,只需將其中一相的電機線交換接入驅動器即可,例如:把A+和A-交換。
2電機是二相四相六根和八根線的,而驅動器只要求接四根線,該怎樣使用?
四相混合式電機也稱二相混合式電機,只是四相電機的繞組引出線有多種接法,對于二相四根線電機,可以直接與驅動器相連對于四相六根線電機,中間抽頭的二根線懸空不接,其它四根線和驅動器相連,對于四相八根線電機,通常把繞組兩兩并聯后與驅動器相連。
3細分后電機的步距角如何計算?
對于兩相和四相電機,細分后的步矩角等于電機的整步步距角除以細分數,例如細分數設定為2驅動0.9度/1.8度電機,其細分步距角為1.8/2=0.9度;如細分數設定為8,驅動0.9度/1.8度電機,其細分步距角為1.8/8=0.225度。
4電機的噪音特別大;而且沒有力,電機本身在振動?
如遇到這種情況時,是因為步進電機工作在振蕩區,一般改變輸入信號頻率CP就可以解決此問題。
5電機在低速運行時正常,當是頻率略高一點就出現堵轉現象?
遇到這種情況多是因為加在驅動器的電源電壓不夠高引起的;把輸入電壓加高一些,就可以解決此問題,注意但不能高于驅動器電源端標注的最高電壓;否則會引起驅動器燒毀,如原來接的電源電壓是直流24V;現本可以把它接在36V。
6驅動器通電以后,電機在抖動;不能運轉?
遇到這種情況時,首先檢查電機的繞組與驅動器連接有沒有接錯;如沒有接錯再檢查輸入頻率CP是否太高;可以參照以下的8.7電機升降速設計簡介解決此問題;如不能解決可能因為驅動器燒毀,請與本公司聯系!
7升降速設計簡介:
步進電機速度控制是靠輸入的脈沖信號的變化來改變的,從理論上說,只需給驅動器脈沖信號即可,每給驅動器一個脈沖(CP),步進電機就旋轉一個步距角(細分時為一個細分步距角)但是實際上,如果脈沖CP信號變化太快,步進電機由于慣性將跟隨不上電信號的變化,這時會產生堵轉和丟步現象,所以步進電機在啟動時,必須有升速過程,在停止時必時有降速過程。一般來說升速和降速規律相同,以下為升速為例介紹:
升速過程由突跳頻率加升速曲線組成(降速過程反之)。突跳頻率是指步進電機在靜止狀態時突然施加的脈沖啟動頻率,此頻率不可太大,否則也會產生堵轉和丟步。升降速曲線一般為指數曲線或經過修調的指數曲線,當然也可采用直線或正弦曲線等。用戶需根據自己的負載
選擇合適的突跳頻率和升降速曲線,找到一條理想的曲線并不容易,一般需要多次‘試機’才行。指數曲線在實際軟件編程中比較麻煩,一般事先算好時間常數存貯在計算機存貯器內,工作過程中直接選取。
步進電機的升降速設計為控制軟件的主要工作量,其設計水平將直接影響電機運行的平穩性、升降速快慢、電機運行聲音、最高速度、定位精度(本公司產品在正確使用條件下,將保證其精度為100%)一種特例是:步進電機的運行速度不超過突跳頻率,這時將不存在升降速問題。

以上信息由企業自行提供,信息內容的真實性、準確性和合法性由相關企業負責,中國傳動網對此不承擔任何保證責任。 溫馨提示:為規避購買風險,建議您在購買產品前務必確認供應商資質及產品質量。
推薦產品
更多+

104ZD/106JB型永磁直

85ZD型永磁直流電機

80ZD型永磁直流電機

76ZD型永磁直流電機

63ZD/60WJ型永磁直流

63ZD型永磁直流電機
 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號