時間:2017-12-22 10:37:16來源:網絡轉載
引言
在交流電機變頻調速中pwm控制已經得到了日益廣泛的應用,其中經典的正弦脈寬調制(spwm),它主要著眼于使逆變器輸出的電壓盡量接近正弦波,使pwm電壓波的基波成分盡量大,諧波成分盡量小,但是該方法僅僅是一種近似,抑制諧波的能力有限。而電壓空間矢量脈寬調制(svpwm)是把逆變器和電機視為一體,控制電機獲得幅值恒定的圓形旋轉磁場。它能夠明顯地減少逆變器的輸出電壓的諧波成分及電動機的諧波耗損,降低了轉矩的脈動。本文根據矢量控制和svpwm調制原理,建立了仿真模型,并對仿真中的關鍵問題和仿真結果進行了分析。
系統仿真模型的建立
基于svpwm的矢量控制模型
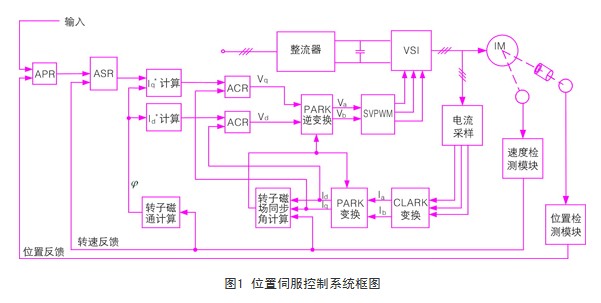
圖1為位置伺服控制系統框圖,該系統通過clarke變換和park變換將檢測到的三相定子電流變換成同步旋轉坐標系下的直流分量id、iq作為電流反饋。給定位置與位置反饋的偏差值經過p調節器,輸出作為用于轉速控制的轉速輸入,位置環的輸出與反饋轉速的偏差經pi調節器,輸出作為用于轉矩控制的電流q軸分量,和通過變換計算的電流d軸分量,與電流反饋的偏差經pi調節器分別輸出q、d同步旋轉坐標軸下的電壓分量vq、vd、vq、vd再經過park逆變換轉換成兩相靜止坐標系下的電壓分量vα、vβ。最后采用svpwm技術產生pwm控制信號來控制逆變器。
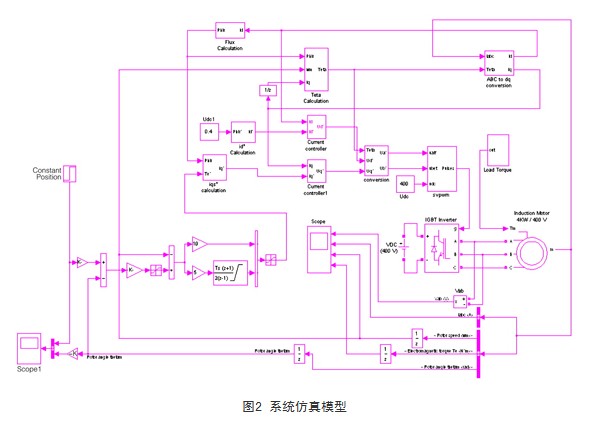
根據svpwm矢量控制的原理,在matlab/simulink下建立系統的仿真模型,如圖2所示。整個仿真模型主要由電機本體模塊、逆變器模塊、svpwm生成模塊、矢量變換模塊、轉子磁鏈位置觀測模塊等幾部分組成。為了使仿真模型更加接近于實際系統,仿真模型中的電機和逆變器模型采用matlab/simulink中simpowersystems模塊中的模型,相當于實際系統中的硬件部分。而其他模型是利用simulink中各個基本模塊搭建起來的子系統,并通過封裝技術將其封裝而成,在實際系統中可以利用軟件實現。
位置、轉速及電流pi調節器
在系統中有四個pi調節器,分別是位置p調節器,轉速pi調節器,轉矩電流pi調節器,勵磁電流pi調節器。這四個pi調節器的輸出都需要限幅,其中位置調節器輸出的限幅值為電機能夠輸出的最大轉速,轉速調節器輸出的限幅值為電機能夠輸出的最大轉矩,兩個電流pi控制器的限幅為電壓空間矢量的最大電壓。另外,這四個pi調節器參數的設置是關系到系統能否穩定的關鍵,也是系統仿真調試時的難點。因為四個pi調節器是相互關聯的任何一個調節器參數的變化都會引起系統的不穩定。對于這四個pi控制器參數的調試經驗非常重要,首先根據經驗確定四個pi控制器參數的大致范圍;然后在這一范圍內慢慢調,一般情況下外環即位置環的p參數對系統的影響較為明顯,所以一般情況下pi參數的調節順序為先外環(位置)后內環(電流環),先比例系數后積分系數。
仿真實驗中,通過反復的調試,最后得到的各個pi參數如下:
位置p調節器kp=20;
轉速pi調節器kp=10,ki=5;
轉矩電流pi調節器kp=200,ki=70;
勵磁電流pi調節器kp=200,ki=70。
svpwm生成模塊
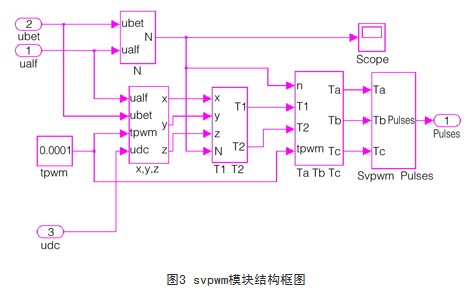
svpwm生成模塊是該仿真系統中的關鍵部分,該模塊以電壓矢量兩相靜止坐標系的分量vα、vβ作為輸入內部給以開關周期tpwm信號,其內部通過電壓矢量區間判斷,根據輸入量產生x、y、z,然后計算功率器件導通時間,再由區間信號及導通時間產生的svpwm脈沖信號控制逆變器的工作模式,結構如圖3所示。
仿真結果及分析
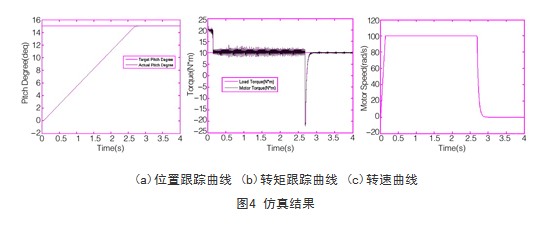
仿真參數為三相異步電機額定電壓400v,頻率為50hz,rr=1.395ω,rs=1.405ω,l1r=0.005839h,l1s=0.005839h,lm=0.1722h,電機極對數p=2,電機額定功率pn=4kw,轉動慣量j=0.0131kg·m2。仿真結果如圖4所示。
結語
仿真結果表明,在帶負載情況下,系統具有良好的動態跟隨性,能很快達到穩定運行狀態,也證明本文中設計的位置伺服矢量控制系統的可行性。
標簽:
![]()
上一篇:無刷電機驅動器的接線端子布...
下一篇:DDC控制的伺服電機
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.siyutn.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-05-19

2025-04-30

2025-04-11

2025-04-08

2025-03-31

2025-03-26












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號