時間:2017-12-22 11:21:21來源:網絡轉載
摘要:針對傳統固定監控架設成本高、監控有死角且需要布置的視頻采集端個數太多的情況,提出一種基于ARM和FPGA相結合架構的移動視頻監控系統及其軟硬件實現方法,在減少視頻采集端節點的前提下,能夠全方位實時捕捉用戶所需的信息。該系統由電機控制模塊、視頻采集模塊和無線網絡控制模塊構成,實現了無線視頻監控系統;基于Linux操作系統、Web服務器和視頻編碼器,實現了用戶可以通過Internet遠程查看目標現場的狀況。

中國視頻監控市場快速發展,數字監控逐步成為主流,網絡化、個人化和智能化將是中國視頻監控市場重要的發展趨勢。但當前基于流媒體傳輸的技術對網絡條件要求較高,不能大面積推廣,固定監控成本太高。如何將視頻監控與Interne相結合,使監控人員可以隨時隨地實施監控,是現代監控技術急需解決的問題。另一方面,目前視頻監控系統采用的微控制器多是ARM9、ARM11等系列微控制器,ARM微控制器硬件外設出廠時已經固定,不利于用戶進行硬件擴展和升級,而ARM和FPGA相結合的多芯片解決方案又會導致系統成本太高,同時還會造成系統資源的浪費,功耗太大。針對以上不足,本文提出了一種新的解決方案,采用Zynq系列處理器,芯片采用的是高性能Cortex-A9雙核和FPGA相結合,ARM部分可以解決高清視頻的處理問題,可編程邏輯FPGA部分可以升級和擴展硬件。
1移動視頻監控系統架構
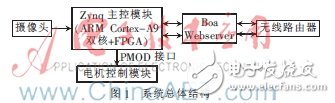
本設計的主控板為Digilent公司的ZedBoard開發板,主芯片Zynq7020結合高性能雙核ARMCortex-A9MPCore處理系統和可編程邏輯于一體[1]。視頻采集端位于移動小車之上,從而達到移動采集視頻的目的。系統的設計主要包括ARM控制部分的設計和FPGA邏輯部分的設計。ARM部分主要用來運行操作系統和系統上的應用軟件,如Web服務器Boa,視頻編碼器mjpg-streamer;FPGA部分主要用來擴展硬件資源,進行小車電機驅動部分PWMIP核的設計。系統總體結構框圖如圖1所示。各模塊功能為:攝像頭負責視頻圖像采集,Zynq主控模塊負責ARM操作系統部分和FPGA邏輯資源部分,電機控制模塊負責智能小車的運動,BoaWebserver負責網絡的交互,無線路由器負責無線網絡數據的收發。
系統上電之后,首先自動執行芯片內部固化的芯片初始化程序,然后執行第一階段的啟動加載器FSBL,使用比特流文件(PWMIP核設計生成的bit文件)對FPGA部分進行配置,待FPGA配置完成后,開始執行U-boot引導程序,啟動Linux操作系統[2]。系統啟動完成后,智能小車通過無線路由器產生無線信號,用戶在另一端就可以通過網絡來連接智能小車終端,實施視頻監控。用戶和系統的交互實現如圖2所示。
本文主要介紹電機控制部分的設計,具體包括電機控制部分硬件電路的設計,FPGA部分PWMIP核的設計,Linux操作系統PWM驅動程序的設計。
2電機控制部分的設計
2.1電機控制部分硬件電路的設計
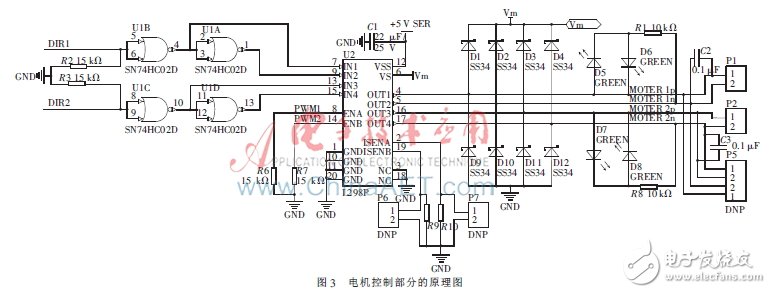
該模塊主要由L298P雙H橋直流電機驅動芯片實現。由于一個L298P芯片可以驅動兩個直流電機,小車有4個車輪,因此需要兩塊L298P芯片[3]。同時,為了減少使用的FPGAI/O引腳數量,在原理圖設計中采用了四二輸入或非門芯片SN74HC02D,這樣用兩個I/O引腳就可以控制L298P的4個輸入端。DIR1、DIR2、PWM1、PWM2通過Zedboard的PMOD接口與FPGA相連。原理圖如圖3所示,圖中IN1、IN2、IN3、IN4為輸入信號,ENA、ENB為使能信號。ENA控制IN1、IN2的輸入使能,ENB控制IN3、IN4的輸入使能。當ENA為1,DIR1為1時(也就是IN1為0,IN2為1時),P1接口上的電動機正轉;當ENA為1,DIR1為0時(也就是IN1為1,IN2為0時),P1接口上的電動機反轉;當ENA為0時,P1接口上的電動機停止。與P2口連接的電動機原理同上。
2.2FPGA部分PWMIP核的設計
Xilinx嵌入式系統部分的設計由其公司推出的EDK(EmbeddedDevelopmentKit)開發套件實現,EDK具有完成嵌入式系統設計的一整套工具,即:硬件設計工具XPS(XilinxPlatformStudio)和軟件設計工具SDK(XilinxSoftwareDevelopmentKit),硬件設計步驟如下:(1)設置新工程路徑;
(2)自定義IP配置外設;
(3)建立UCF文件;
(4)bit流的生成[4]。自定義IP的部分主要實現電機的正轉,反轉和停止控制。關鍵VerilogHDL代碼如下:
case(state)
//電機停止
′NOP:{pwm_left,pwm_right}<={7′d0,7′d0};
′GOING://電機正向旋轉
begin
if(dis_value>31)
{pwm_left,pwm_right,dir_lself,dir_rself}
<={7′d100,7′d100,1′d0,1′d0};
else
{pwm_left,pwm_right,dir_lself,dir_rself}<=
{{dis_value[4:0],2′b0},{dis_value[4:0],2′b0},1′d1,1′d1};
end
′RETURN://電機反向旋轉
begin
if(dir_value==3′b010)
{pwm_left,pwm_right,dir_lself,dir_rself}<={7′d80,7′d80,1′d1,1′d0};
else
{pwm_left,pwm_right,dir_lself,dir_rself}<={7′d80,7′d80,1′b0,1′b1};
end
endcase
在本設計中,對電機的控制,傳輸的數據量較小,只需要添加一個低速的AXI4-Lite總線設備PWM模塊來控制PMOD接口就可以實現硬件設備之間通信,其中AXI4-Lite的全局時ACLK設置為100MHz,PWM模塊分配的起始物理地址為0x6CA00000,空間大小為64KB,PWM配置信息如圖4所示。
2.3Linux下電機驅動部分的設計
由于遠端傳輸是在Linux系統下TCP/IP協議實現的,因此,編寫Linux下的IP驅動,應用程序就可以通過Linux的標準接口訪問FPGA的PMOD接口設備。本設計編寫的是字符型設備驅動程序,包含設備加載、設備卸載以及文件操作函數。PWM模塊加載時系統調用module_init(pwm_init)宏實現模塊的初始化操作,在本系統中pwm_init()函數主要完成以下工作:(1)內核注冊字符型設備驅動;(2)創建PWM設備類;(3)利用PWM設備類創建設備;(4)將PWM模塊物理地址映射到虛擬地址上[5]。部分關鍵代碼如下所示:
//XPS分配的物理地址
#definePWM_MOUDLE_PHY_ADDR0x6CA00000
//注冊驅動
pwm_driver_major=register_chrdev(0,DEVICE_NAME,&pwm_driver_fops);
pwm_driver_class=class_create(THIS_MODULE,"
pwm_driver");//創建設備類
pwm_driver_device=device_create(pwm_driver_class,NULL,MKDEV(pwm_driver_major,0),NULL,"pwm_device");
//利用設備類創建設備
//將PWMIP物理地址映射為虛擬地址
pwm_fre_addr=(unsignedlong)ioremap(PWM_MOUDLE_PHY_ADDR,sizeof(u32));
初始化工作結束,但是僅有初始化函數,設備仍然無法工作,還需要有實現頻率和占空比的調節機制。控制PWM的頻率函數如下所示:
staTIcssize_tsys_pwm_frequency_set(structdevice*dev,structdevice_attribute*attr,constchar*buf,size_tcount)
{
longvalue=0;
inti;
frequency=0;
//修改頻率之前,關閉PWM模塊
outl(value,pwm_fre_addr);
//將寫入pwm_frequency中的字符串轉化為整數
for(i=0;i100000000)value=100000000;
value=100000000/frequency;
//將計數值寫入到PWM模塊的pwm_fre_addr寄存器中
outl(value,pwm_fre_addr);
returncount;
}
控制PWM占空比的函數和控制PWM頻率的函數一樣。
3實驗結果及測試
系統的主控制板為Zedboard開發板,上電啟動后,無線路由器會發布一個SSID為Tp_Link_5C90的無線網絡,可以通過任何可以上網的設備連接這個網絡。在瀏覽器中輸入網址:192.168.1.100,就會登錄到移動視頻監控的網頁上,通過界面的按鈕控制視頻終端的運行。
本文設計采用XilinxAllProgrammable芯片Zynq作為主控CPU,FPGA部分可以實現邏輯擴展和功能補充。例如:自定義通信協議、IP核,同時還可以利用Xilinx的部分可重配置技術升級硬件系統,易于后期擴展和硬件升級;ARM部分采用的是性能較高的Cortex-A9雙核,使得對高清晰視頻的處理較為流暢,而且系統整體功能也比較穩定。相比于傳統的模擬監控,數字視頻處理技術提高了圖像的質量和監控效率。
設計中采用軟硬件協同設計的方法,即:在整個系統及定義的基礎上,同時對軟硬件進行設計和協調,其中包括軟硬件的劃分(哪些功能使用軟件完成,哪些功能使用硬件完成)、軟硬件系統的開發與聯合調試,降低了開發風險,縮短了開發周期。
參考文獻
[1]XilinxInc.UG585,Zynq-7000AllProgrammableSoCTechnicalReferenceMannual[Z].2013.
[2]XilinxInc.UG873,Zynq-7000AllProgrammableSoC:Concepts,ToolsandTechniques[Z].2013:12-35,40-53.
[3]王芳芳,張歡.基于Zynq平臺的動態智能家居系統的設計[J].軟件,2013,34(8):98-100.
[4]胡典榮,郭春生.基于ZedBoard的SPI和以太網傳輸設計[J].杭州電子科技大學學報,2013,33(5):126-129.
[5]陸佳華,江舟,馬岷.嵌入式系統軟硬件協同設計指南:基于XilinxZynq[M].北京:機械工業出版社,2013.
標簽:
![]()
上一篇:直線步進電機在壓路機發動機...
下一篇:松下系列交流伺服電機驅動器...
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.siyutn.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-06

2025-05-19

2025-04-30

2025-04-11

2025-04-08

2025-03-31












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號