ērťg£ļ2018-01-24 10:34:58ĀŪ‘ī£ļĺWĹjřD›d
ģĒő“āÉ’Ą’ď»’“śüŠťTĶńĻ§ėI4.0°Ę÷«ń‹÷∆‘žŖ@–©‘íÓ}ēr£¨ôC∆ų»ň «“ĽāÄüo’ď»Áļő“≤ņ@≤Ľť_ĶńÜĖÓ}°£ôC∆ų»ňĶń÷«ń‹ĽĮ≥Ő∂»”įŪĎ÷Ý’ŻāÄĻ§ėI—›ĽĮĶńŖM≥Ő£¨āųĹyĶńôC∆ų»ňÉHń‹‘ŕáņłŮ∂®ŃxĶńĹYėčĽĮ≠hĺ≥÷–ąŐ––ÓA∂®÷łŃÓĄ”◊ų£¨»Ī∑¶Ć¶≠hĺ≥Ķńł–÷™ŇcĎ™◊Éń‹Ń¶£¨Ŗ@ėOīůĶōŌř÷∆ŃňôC∆ų»ňĶńĎ™”√°£ņŻ”√ôC∆ų»ňĶń“ē”XŅō÷∆£¨≤Ľ–Ť“™ÓAŌ»Ć¶Ļ§ėIôC∆ų»ňĶńŖ\Ą”‹ČŘEŖM–– ĺĹŐĽÚŽxĺÄĺé≥Ő£¨Ņ…ĻĚľsīůŃŅĶńĺé≥Őērťg£¨ŐŠłŖ…ķģa–߬ ļÕľ”Ļ§Ŕ|ŃŅ°£Ŗ@ĺÕ «ő“āÉėňÓ}÷–ŐŠĶĹĶń£¨Ľý”ŕôC∆ų“ē”XĶńĻ§ėIôC∆ų»ň∂®őĽľľ–g°£Ŗ@“Ľľľ–g‘ŕáÝÉ»◊Ó‘ÁĪĽĎ™”√”ŕļłĹ”ôC∆ų»ňƶļłŅpĶńłķŘô£¨∂ÝĺS“ēąDŌŮĶń“ē”X≤…ľĮ‘OāšľįąDŌŮŐéņŪ‹õľĢ£¨≥…ěť––ėIÉ»“ē”X“żĆßĶńŌ»ÚĆļÕ ◊Ŗx°£
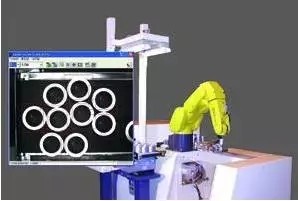
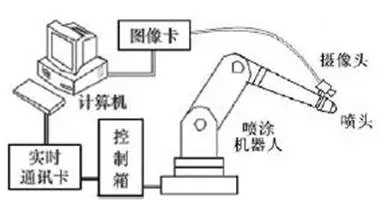
Ķš–ÕĶńôC∆ų»ň“ē”X∂®őĽŌĶĹyėč≥…»ÁąD1ňý ĺ£¨‘ŕÍPĻĚ–ÕôC∆ų»ňń©∂ňį≤—bÜőāÄĒzŌŮôC£¨ ĻĻ§ľĢń‹ÕÍ»ę≥Ų¨F‘ŕĒzŌŮôCĶńąDŌŮ÷–°£ŌĶĹyįŁņ®ĒzŌŮôCŌĶĹyļÕŅō÷∆ŌĶĹy£ļ
(1)ĒzŌŮôCŌĶĹy£ļ”…ÜőāÄĒzŌŮôCļÕ”čň„ôC(įŁņ®ąDŌŮ≤…ľĮŅ®)ĹM≥…£¨ōďōü“ē”XąDŌŮĶń≤…ľĮļÕôC∆ų“ē”Xň„∑®°£ĺÕńŅ«į––ėIľľ–gįl’Ļňģ∆ĹĀŪ’f£¨ĒĶ◊÷ŌŗôC «Ī»›^ņŪŌŽĶńŖxďŮ£¨∆š÷–ĺS“ēąDŌŮĶńMV-EM/EŌĶŃ–Ļ§ėIŌŗôCŐŠĻ©ŃňĹ”ŅŕōSłĽĶńť_įlįŁļĮĒĶ£¨∑÷Īś¬ °Ę騬 Ķ»ł≤…w√śŹV£¨Õ®”√–‘ľį∑Ä∂®–‘ļ√£¨ňý“‘ «ő“āÉÕ∆ň]Ķń ◊“™ŖxďŮ°£
(2)Ņō÷∆ŌĶĹy£ļ”…”čň„ôCļÕŅō÷∆ŌšĹM≥…£¨”√ĀŪŅō÷∆ôC∆ų»ňń©∂ňĶńĆćŽHőĽ÷√°£ĹõCCDĒzŌŮôCƶĻ§◊ųÖ^ŖM––ŇńĒz£¨”čň„ôCÕ®Ŗ^ąDŌŮ◊RĄe∑Ĺ∑®£¨ŐŠ»°łķŘôŐō’ų£¨ŖM––ĒĶďĢ◊RĄeļÕ”čň„£¨Õ®Ŗ^ńśŖ\Ą”ĆW«ůĹ‚Ķ√ĶĹôC∆ų»ňłųÍPĻĚőĽ÷√’`≤Ó÷Ķ£¨◊ÓļůŅō÷∆łŖĺę∂»Ķńń©∂ňąŐ––ôCėč£¨’{’ŻôC∆ų»ňĶńőĽ◊ň°£
ąD1ôC∆ų»ň“ē”X∂®őĽŌĶĹyĹM≥…
Ō¬√śő“āÉĀŪ‘ĒľöĶńĹ‚őŲ“ĽŌ¬“ē”X“żĆßôC∆ų»ňĶńĻ§◊ų‘≠ņŪ°£ ◊Ō»£¨ Ļ”√CCDĒzŌŮôC(įŁņ®ÁRÓ^Ķ»ąDŌŮ≤…ľĮ‘Oāš)ĆĘ“ēÓl–ŇŐĖ›Ē»Ž”čň„ôC£¨≤ĘÕ®Ŗ^‹õľĢƶ∆šŅžňŔŐéņŪ°£ŐéņŪĶńŖ^≥Ő «Ŗ@ė”Ķń£ļŖx»°ĪĽłķŘôőÔůwĶńĺ÷≤ŅąDŌŮ£¨‘ď≤ĹůEŌŗģĒ”ŕŽxĺÄĆWŃēĶńŖ^≥Ő£¨‘ŕąDŌŮ÷–Ĺ®ŃĘ◊ÝėňŌĶ“‘ľį”ĖĺöŌĶĹyƧ’“łķŘôőÔ°£ĆWŃēĹY Ýļů£¨ŌŗôC≤ĽÕ£Ķō≤…ľĮąDŌŮ£¨ŐŠ»°łķŘôŐō’ų£¨ŖM––ĒĶďĢ◊RĄeļÕ”čň„£¨Õ®Ŗ^ńśŖ\Ą”ĆW«ůĹ‚Ķ√ĶĹôC∆ų»ňłųÍPĻĚőĽ÷√Ĺo∂®÷Ķ£¨◊ÓļůŅō÷∆łŖĺę∂»Ķńń©∂ňąŐ––ôCėč£¨’{’ŻôC∆ų»ňĶńőĽ◊ň°£Ļ§◊ųŃų≥Ő»ÁŌ¬ąDňý ĺ°£
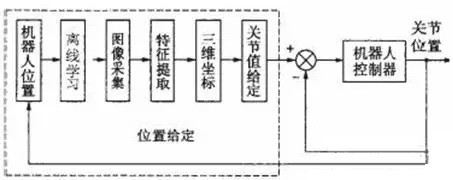
“ē”X∂®őĽŌĶĹy‹õľĢŃų≥ŐąD
Ŗ@ė”£¨“ē”X∂®őĽŌĶĹyĆĘĽý”ŕÖ^”ÚĶń∆•ŇšļÕ–ő†ÓŐō’ų◊RĄeĹYļŌ£¨ŖM––ĒĶďĢ◊RĄeļÕ”čň„£¨ń‹ČÚŅžňŔú ī_Ķō◊RĄe≥ŲőÔůwŐō’ųĶńŖÖĹÁŇc÷––ń£¨ôC∆ų»ňŅō÷∆ŌĶĹyÕ®Ŗ^ńśŖ\Ą”ĆW«ůĹ‚Ķ√ĶĹôC∆ų»ňłųÍPĻĚőĽ÷√ĶńřDĹ«’`≤Ó£¨◊ÓļůŅō÷∆łŖĺę∂»Ķńń©∂ňąŐ––ôCėč£¨’{’ŻôC∆ų»ňĶńőĽ◊ň“‘ŌŻ≥żīň’`≤Ó°£Źń∂ÝĹ‚õQŃňôC∆ų»ňń©∂ňĆćŽHőĽ÷√Ňc∆ŕÕŻőĽ÷√Ōŗĺŗ›^ŖhĶńÜĖÓ}£¨łń…∆ŃňāųĹyôC∆ų»ňĶń∂®őĽĺę∂»°£
ėňļě£ļ
![]()
…Ō“Ľ∆™£ļôC∆ų“ē”XôzúyŌĶĹyĆćŽHĎ™”√łŇ’ď
Ō¬“Ľ∆™£ļ◊‘Ą”ĽĮīůė«÷–ĶńPLCĎ™”√
÷–áÝāųĄ”ĺWįśôŗŇc√‚ōü¬ē√ų£ļ∑≤ĪĺĺW◊Ę√ų[ĀŪ‘ī£ļ÷–áÝāųĄ”ĺW]Ķńňý”–őń◊÷°ĘąD∆¨°Ę“Ű“ēļÕ“ēÓlőńľĢ£¨įśôŗĺýěť÷–áÝāųĄ”ĺW(www.siyutn.com)™öľ“ňý”–°£»Á–ŤřD›d’ąŇc0755-82949061¬ďŌĶ°£»őļő√Ĺůw°ĘĺW’ĺĽÚāÄ»ňřD›d Ļ”√ērŪö◊Ę√ųĀŪ‘ī°į÷–áÝāųĄ”ĺW°Ī£¨Ŗ`∑ī’ŖĪĺĺWĆĘ◊∑ĺŅ∆š∑®¬…ōü»ő°£
ĪĺĺWřD›d≤Ę◊Ę√ų∆šňŻĀŪ‘īĶńłŚľĢ£¨ĺýĀŪ◊‘Ľ•¬ďĺWĽÚėIÉ»Õ∂łŚ»ň Ņ£¨įśôŗĆŔ”ŕ‘≠įśôŗ»ň°£řD›d’ąĪ£ŃŰłŚľĢĀŪ‘īľį◊ų’Ŗ£¨ĹŻ÷Ļ…√◊‘īŘłń£¨Ŗ`’Ŗ◊‘ōďįśôŗ∑®¬…ōü»ő°£
ģa∆∑–¬¬Ą
łŁ∂ŗ>
Ļ‹«–łŖ–ßľ”Ļ§√ōľģ£ļ–°Ļ‹Ő◊ŃŌ+Tekla≤ŚľĢ...
2025-05-19

B1ŌĶŃ–√}õ_–ÕňŇ∑ĢĻ§ňá∂őĻ¶ń‹…ŌĺÄ£¨◊ĆôC...
2025-04-30

–‘ń‹‹S…ż20%£°ĺSļÍNK300CX PlusĒĶŅōŌĶĹy...
2025-04-11

rpi-image-gen£ļėš›ģŇ…‹õľĢÁRŌŮėčĹ®ĶńĹK...
2025-04-08

°ĺģa∆∑Ĺ‚◊x°Ņ»ę√śŐŠ…żĺę√‹÷∆‘žôzúyĻĚŇń...
2025-03-31

Ď™”√įłņż | Ļ”√ļÍľĮTELEĪOŅōņ^Žä∆ųĪOŅō...
2025-03-26
Õ∆ň]Ć£Ó}
łŁ∂ŗ>ĺW’ĺļÜĹť|ēĢÜT∑ĢĄ’|¬ďŌĶ∑Ĺ Ĺ|éÕ÷ķ–ŇŌĘ|įśôŗ–ŇŌĘ|ĺW’ĺĶōąD|”—«ťśúĹ”|∑®¬…÷ß≥÷|“‚“ä∑īūĀ|sitemap
āųĄ”ĺW-Ļ§ėI◊‘Ą”ĽĮŇc÷«ń‹÷∆‘žĶń»ę√Ĺůw°įĽ•¬ďĺW+°ĪĄď–¬∑ĢĄ’∆ĹŇ_
 ĺW’ĺŅÕ∑Ģ∑ĢĄ’◊…‘É≤…ŔŹ◊…‘É√ĹůwļŌ◊ų
ĺW’ĺŅÕ∑Ģ∑ĢĄ’◊…‘É≤…ŔŹ◊…‘É√ĹůwļŌ◊ų
Chuandong.com Copyright ?2005 - 2025 £¨All Rights Reserved …ÓŘŕ –äW√ņīůŐ∆ŹVłś”–ŌřĻęňĺ įśôŗňý”– ĽõICPāš 14004826ŐĖ | †IėIąŐ’’◊CēÝ | ≤ĽŃľ–ŇŌĘŇeąů÷––ń |  ĽõĻęĺWį≤āš 44030402000946ŐĖ
ĽõĻęĺWį≤āš 44030402000946ŐĖ











