1引言
蒸汽發(fÄ)生器(steamgenerator,sgï¼‰æ˜¯æ ¸å³¶å…§(nèi)的三大è¨(shè)å‚™ä¹‹ä¸€ï¼Œæ ¸é›»å» åŠŸçŽ‡æ失ä¸æœ‰80%是由其æå£žå¼•èµ·çš„ã€‚æ ¸é›»å» é‹(yùn)行期間二回路系統(tÇ’ng)æ料的è…è•ç”¢(chÇŽn)物進(jìn)å…¥sg二次å´(cè),蒸發(fÄ)ã€æ¿ƒé›†æ²‰ç©åœ¨å‚³ç†±ç®¡ã€ç®¡æ¿å’Œæ”¯æ’æ¿ä¸ŠåŠæ”¯æ’æ¿èˆ‡å‚³ç†±ç®¡éš™ç¸«ä¹‹é–“,形æˆç¡¬ç‹€æ³¥æ¸£ï¼Œåš´(yán)é‡å½±éŸ¿äº†sg的傳熱管的完整性ã€å‚³ç†±æ•ˆçŽ‡å’Œsgçš„æ°´ä½æŽ§åˆ¶ï¼Œå¿…é ˆå¾—åˆ°æœ‰æ•ˆçš„åŽ»é™¤ã€‚
2系統(tÇ’ng)組æˆ
2.1系統(tÇ’ng)æè¿°
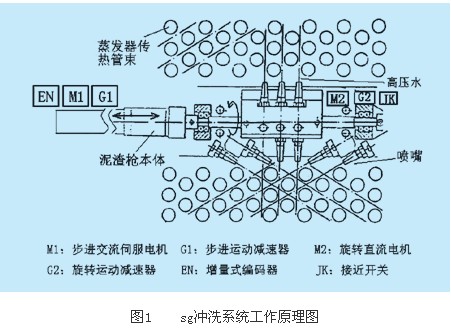
用于sg的水力沖洗è£ç½®å¯ä»¥æŠ½è±¡ç‚ºä¸€å€‹(gè)具有兩自由度的機(jÄ«)器手臂。如圖1ä¸æ‰€ç¤ºï¼Œåœ–1ä¸ï¼šm1:æ¥é€²(jìn)交æµä¼ºæœé›»æ©Ÿ(jÄ«)ã€g1:æ¥é€²(jìn)é‹(yùn)å‹•(dòng)減速器ã€m2:旋轉(zhuÇŽn)ç›´æµé›»æ©Ÿ(jÄ«)ã€g2:旋轉(zhuÇŽn)é‹(yùn)å‹•(dòng)減速器ã€en:增é‡å¼ç·¨ç¢¼å™¨ã€jk:接近開(kÄi)é—œ(guÄn)。沖洗機(jÄ«)å™¨æ‰‹è‡‚é ‚ç«¯å™´å˜´åœ¨æ—‹è½‰(zhuÇŽn)電機(jÄ«)m2的帶動(dòng)下,將內(nèi)部的高壓水射å‘é (yuÇŽn)è¿‘è·é›¢ä¸åŒçš„傳熱管處。為防æ¢æ—‹è½‰(zhuÇŽn)部分與sgå…§(nèi)部構(gòu)件發(fÄ)生碰撞導(dÇŽo)è‡´å µè½‰(zhuÇŽn),è¨(shè)置了接近開(kÄi)é—œ(guÄn)jk進(jìn)行狀態(tà i)監(jiÄn)視。整個(gè)æ©Ÿ(jÄ«)器手臂在交æµä¼ºæœæ¥é€²(jìn)電機(jÄ«)m1å’Œplc的控制下,將噴嘴定ä½åˆ°æ¯æŽ’管間處。光電編碼器模塊en和控制器plc組æˆé«˜ç²¾åº¦æ¥é€²(jìn)é‹(yùn)å‹•(dòng),防æ¢é«˜å£“æ°´é•·(zhÇŽng)時(shÃ)間沖擊傳熱管管å£ï¼Œå±æ©Ÿ(jÄ«)蒸汽發(fÄ)生器è¨(shè)備安全。整個(gè)控制系統(tÇ’ng)æ ¹æ“š(jù)è¨(shè)計(jì)è¦æ±‚,能進(jìn)è¡Œå„種åƒæ•¸(shù)è¨(shè)定ã€é‹(yùn)行狀態(tà i)顯示和系統(tÇ’ng)自診斷。在故障狀態(tà i)ä¸‹ï¼Œå…·æœ‰å ±(bà o)è¦åŠŸèƒ½å’Œç·Šæ€¥åœæ¢åŠŸèƒ½ã€‚æ ¹æ“š(jù)系統(tÇ’ng)的控制è¦æ±‚,整個(gè)硬件的é…置和分布如下:
(1ï¼‰æ ¸å³¶å…§(nèi)高輻射å€(qÅ«)域(sgæ—)
æ²–æ´—æ©Ÿ(jÄ«)器手臂本體:包括æ¾ä¸‹minasa系列伺æœæ¥é€²(jìn)電機(jÄ«)m1ã€æ—‹è½‰(zhuÇŽn)ç›´æµé›»æ©Ÿ(jÄ«)m2ã€æŽ¥è¿‘é–‹(kÄi)é—œ(guÄn)jk和編碼器en;
(2ï¼‰æ ¸å³¶å…§(nèi)低輻射å€(qÅ«)域(è·sg10m處)
ç¾(xià n)å ´(chÇŽng)手æ“控制箱一個(gè),是整個(gè)控制系統(tÇ’ng)çš„æ ¸å¿ƒéƒ¨åˆ†ã€‚åŒ…æ‹¬siemenss7-200系列cpu224plcã€äº¤æµä¼ºæœé›»
æ©Ÿ(jÄ«)é©…(qÅ«)å‹•(dòng)模塊ã€ç›´æµé›»æ©Ÿ(jÄ«)é©…(qÅ«)å‹•(dòng)模塊ã€24vç›´æµé›»æºå’ŒæŽ§åˆ¶ç¹¼é›»å™¨ç‰;
(3ï¼‰æ ¸å³¶å¤–éžè¼»å°„å€(qÅ«)域
人機(jÄ«)ç•Œé¢siemenstp7觸摸å±ã€é«˜å£“供水å系統(tÇ’ng)ã€æ³¥æ¸£æ”¶é›†å系統(tÇ’ng);
2.2plc與電機(jī)驅(qū)動(dòng)模塊的連接
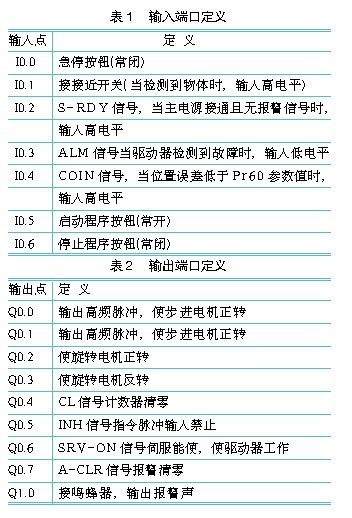
控制器plcå´(cè)和伺æœé›»æ©Ÿ(jÄ«)å´(cè)連接è¨(shè)計(jì)的好壞,直接影響整個(gè)高精度伺æœé‹(yùn)å‹•(dòng)控制系統(tÇ’ng)。cpu224plc為14路數(shù)å—é‡è¼¸å…¥/10路數(shù)å—é‡è¼¸å‡ºï¼Œq0.0å’Œq0.1產(chÇŽn)生兩路ç¨(dú)ç«‹çš„20khz高速脈沖,輸入伺æœé©…(qÅ«)å‹•(dòng)模塊進(jìn)行經(jÄ«ng)功率放大,控制æ¥é€²(jìn)電機(jÄ«)工作。輸入/輸出端å£å®šç¾©å¦‚表1和表2æ‰€ç¤ºã€‚æ ¹æ“š(jù)伺æœé©…(qÅ«)å‹•(dòng)模塊的相關(guÄn)控制信號(hà o),形æˆé‚輯判斷。
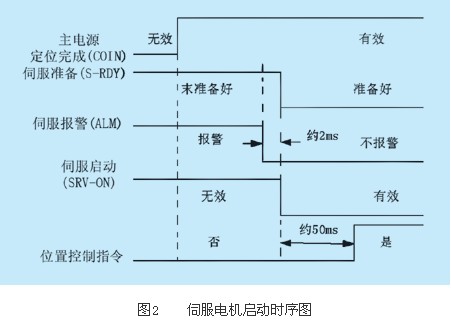
æ¥é€²(jìn)電機(jÄ«)單次æ¥é€²(jìn)行程完æˆåŽï¼Œè‹¥ä½ç½®å差計(jì)數(shù)器內(nèi)的剩余脈沖數(shù)在è¨(shè)定范åœå…§(nèi)時(shÃ),ä½ç½®åˆ°é”(dá)信號(hà o)(coin)就被é€å…¥æŽ§åˆ¶å™¨ã€‚ä½ç½®å差計(jì)數(shù)器大å°ç”±ä¼ºæœé©…(qÅ«)å‹•(dòng)模塊內(nèi)åƒæ•¸(shù)pr60é©ç•¶(dÄng)è¨(shè)置。è¨(shè)定值太å°ï¼Œé€å‡ºcoin信號(hà o)時(shÃ)間會(huì)éŽ(guò)é•·(zhÇŽng)æˆ–é€ æˆæŠ–å‹•(dòng)。è¨(shè)定值éŽ(guò)大導(dÇŽo)致無(wú)法完æˆç²¾åº¦è¦æ±‚。驅(qÅ«)å‹•(dòng)器å´(cè)的電機(jÄ«)控制時(shÃ)åºåœ–如圖2所示。
3軟件è¨(shè)計(jì)
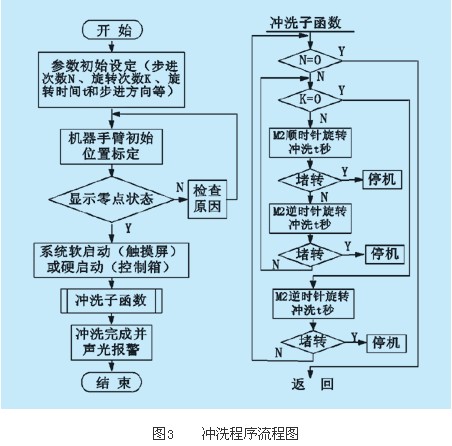
西門ås7-200microplcæ供了上ä½æ©Ÿ(jÄ«)編程軟件step7-micro/win。其強(qiáng)大的功能æ供了兩種指令集(simatic或iec1131-3)和三種程åºç·¨è¼¯å™¨ï¼ˆèªž(yÇ”)å¥è¡¨stl,梯形圖lad和功能塊圖fbd)。然åŽåˆ©ç”¨pc/ppi電纜建立s7-200cpu與個(gè)人計(jì)ç®—æ©Ÿ(jÄ«)之間的通訊,將上ä½æ©Ÿ(jÄ«)的組態(tà i)程åºä¸‹è£åˆ°plcä¸ç¨(dú)ç«‹é‹(yùn)è¡Œã€‚ç‚ºé †æ‡‰(yÄ«ng)ç›®å‰åœ–形化編程的趨勢(shì),程åºä¸é‡‡ç”¨äº†æ¢¯å½¢åœ–的編程方å¼ã€‚整個(gè)沖洗程åºæµç¨‹åœ–如圖3所示。控制系統(tÇ’ng)的人機(jÄ«)ç•Œé¢ï¼ˆhmi)采用siemenstp7觸摸å±ï¼Œæ˜“于實(shÃ)ç¾(xià n),æ“作簡(jiÇŽn)單,é‹(yùn)è¡Œå¯é 。
4精度控制
æ¾ä¸‹ä¼ºæœäº¤æµé›»æ©Ÿ(jÄ«)帶有一個(gè)增é‡å¼ç·¨ç¢¼å™¨ï¼ˆ2500p/r)進(jìn)è¡Œä½ç½®ç›£(jiÄn)控。當(dÄng)èµ·åœé »çŽ‡è¶…出時(shÃ),通éŽ(guò)æ¥æ•¸(shù)丟失å¯ä»¥æª¢æ¸¬(cè)到ä½ç½®éŒ¯(cuò)誤。一旦檢測(cè)出ä½ç½®èª¤å·®ï¼Œå°±ä»¥è¼ƒä½Žé »çŽ‡é€²(jìn)è¡Œä½ç½®æ ¡æ£ï¼Œå¾žè€Œæ§‹(gòu)æˆä¸€å€‹(gè)高精度的é‹(yùn)å‹•(dòng)控制系統(tÇ’ng)。
æ§é«”æ¥é€²(jìn)一次控制器plc發(fÄ)出脈沖個(gè)數(shù)計(jì)算:
(1)已知æ¢ä»¶ï¼šæ¸›é€Ÿå™¨æ¸›é€Ÿæ¯”i:45;æ¥é€²(jìn)é•·(zhÇŽng)度:25mm;伺æœé›»æ©Ÿ(jÄ«)編碼器精度:2500p/r;å€é »æ¯”(驅(qÅ«)å‹•(dòng)模塊內(nèi)é›»å齒輪比):45:2;減速器輸出端齒輪分度圓直徑d:20mm。
(2)計(jì)算:plc應(yÄ«ng)發(fÄ)出脈沖個(gè)數(shù)b=25/a=3979(脈沖)電機(jÄ«)脈沖當(dÄng)é‡a=22.5Ï€d/5000i=0.006283mm/p(毫米/脈沖)å°(duì)控制系統(tÇ’ng)而言,沖洗機(jÄ«)器手臂的é‹(yùn)å‹•(dòng)精度主è¦ä¾è³´äºŽæ§é«”çš„æ¥é€²(jìn)é‹(yùn)å‹•(dòng)精度。由以上計(jì)ç®—å¯çŸ¥æ¥é€²(jìn)傳動(dòng)精度0.006283mm/p(脈沖),采用光電編碼器模塊,極大程度上克æœäº†æ¥é€²(jìn)éŽ(guò)程ä¸å¤±æ¥ç¾(xià n)象產(chÇŽn)生的é‹(yùn)å‹•(dòng)èª¤å·®ï¼Œå› æ¤ç³»çµ±(tÇ’ng)總的誤差主è¦ç”±äºŽæ©Ÿ(jÄ«)械è£é…誤差和機(jÄ«)械傳動(dòng)誤差。在調(dià o)試的éŽ(guò)程ä¸ï¼Œæ‡‰(yÄ«ng)æ ¹æ“š(jù)實(shÃ)際的æ¥é€²(jìn)é•·(zhÇŽng)度,調(dià o)整伺æœé›»æ©Ÿ(jÄ«)ç†è«–計(jì)算出的脈沖個(gè)數(shù),從而補(bÇ”)å„Ÿæ©Ÿ(jÄ«)械部分產(chÇŽn)生的誤差。
5çµ(jié)æŸèªž(yÇ”)
本文è¨(shè)計(jì)的水力沖洗系統(tÇ’ng)ç©©(wÄ›n)定性好ã€ç²¾åº¦é«˜ã€æ˜“于ç¶è·(hù),已經(jÄ«ng)多次在國(guó)å…§(nèi)å„æ ¸é›»ç«™ç¾(xià n)å ´(chÇŽng)æœå‹™(wù)ã€‚åœ¨ç§¦å±±ä¸€æœŸæ ¸é›»ç«™æŸæ¬¡æ£å¸¸åœå †ä¸ï¼Œå¾žå…©è‡º(tái)sg共沖出泥渣約120.5kg,能較好滿足æ¥(yè)主的è¦æ±‚,æé«˜äº†æ ¸é›»ç«™çš„é‹(yùn)行和管ç†æ°´å¹³ã€‚


















 網(wÇŽng)站客æœ
網(wÇŽng)站客æœ 粵公網(wÇŽng)安備 44030402000946號(hà o)
粵公網(wǎng)安備 44030402000946號(hà o)