時間:2022-11-28 10:04:44來源:Stephen Evanczuk
然而,對于許多開發(fā)人員而言,由于所需硬件和應(yīng)用軟件的復(fù)雜性,收集、結(jié)構(gòu)化處理、傳輸、分析和應(yīng)用傳感器數(shù)據(jù)以進行預(yù)測性維護的任務(wù)仍然難以完成。
為了滿足業(yè)界對預(yù)測性維護快速增長的興趣,半導(dǎo)體供應(yīng)商正在推出結(jié)合了許多必需硬件和軟件的綜合平臺解決方案。借助此類平臺,工業(yè)應(yīng)用開發(fā)人員可以更快速、更經(jīng)濟高效地開發(fā)并運行預(yù)測性維護系統(tǒng)。
本文討論運用物聯(lián)網(wǎng) (IoT) 進行預(yù)測性維護的現(xiàn)代概念,以及它如何能夠大幅改善流程和結(jié)果。然后,本文介紹 STMicroelectronics 的預(yù)測性維護平臺,并闡述開發(fā)人員如何使用該硬件與軟件,來評估預(yù)測性維護功能和開發(fā)自己的應(yīng)用。
維護工作的演變——從猜測到預(yù)測
多年來,工業(yè)工程師使用振動分析和其他方法來檢測機器中的問題。過去,工程師依靠手持式分析儀或其他專用測試設(shè)備來收集和處理數(shù)據(jù),以進行設(shè)備分析。借助物聯(lián)網(wǎng)概念,制造商現(xiàn)在可以使用低成本傳感器對關(guān)鍵設(shè)備進行檢測,從而獲得實時監(jiān)控所需的詳細數(shù)據(jù)流。
持續(xù)評估設(shè)備性能的能力為工廠運營提供了重要優(yōu)勢。現(xiàn)在,工業(yè)工程師可以使用本地或遠程監(jiān)控應(yīng)用來增強甚至取代計劃的手動維護程序,后者可能在沒有問題存在的情況下耗費精力,或者來不及防止小問題升級成設(shè)備損壞。工廠操作人員不是被動地對可能導(dǎo)致生產(chǎn)線關(guān)停的問題作出反應(yīng),而是使用基于傳感器的方法提前發(fā)現(xiàn)問題,安排所需的資源,甚至更換機器,并在適當?shù)臅r間進行維修,以便最大限度地降低對生產(chǎn)的影響。
通過預(yù)測性維護,設(shè)施管理人員有機會在問題釀成災(zāi)難性故障之前發(fā)現(xiàn)問題,從而保持生產(chǎn)線的完整性和工人的安全,同時還能分析數(shù)據(jù)以改進流程和結(jié)果。開發(fā)人員面臨的挑戰(zhàn)之一是創(chuàng)建一個平臺,以便能以所需的帶寬和分辨率收集數(shù)據(jù),檢測受監(jiān)控設(shè)備中潛在問題的跡象。
對于振動分析,工業(yè)工程師通常要收集時域和頻域兩方面的振動數(shù)據(jù)。經(jīng)驗豐富的工程師只需查看這兩個域的數(shù)據(jù),即可識別設(shè)備中的機械問題。例如,持續(xù)時間較短且頻率帶寬較寬的周期性脈沖通常意味著某個部件(如滾珠軸承)有缺陷,導(dǎo)致其在每次旋轉(zhuǎn)時都會撞擊軌道壁。相反,持續(xù)時間較長且?guī)捿^窄的事件可能意味著部件正在相互摩擦,最終導(dǎo)致磨損并可能發(fā)生故障。
然而,為了可靠地捕獲這種數(shù)據(jù),振動傳感器需要足夠堅固以維持運行,而不受突然沖擊、強烈振動或工業(yè)環(huán)境中常見的其他事件的影響。即使在正常工作時,工業(yè)設(shè)備也可能產(chǎn)生超過早期振動傳感器能力的振動和機械沖擊。基于微機電系統(tǒng) (MEMS) 技術(shù)的傳感器的出現(xiàn)在很大程度上消除了這種擔憂。MEMS 傳感器(例如 STMicroelectronics ISM330DLC)能夠承受高達 10.000 g 的突發(fā)加速度 0.2 毫秒 (ms),并且能以足夠快的速度恢復(fù),從而提供靈敏度為千分之一重力的線性加速度測量。
盡管來自運動傳感器的可靠數(shù)據(jù)對于故障分析至關(guān)重要,但振動只是機器運行狀況的一個指標。經(jīng)驗豐富的工程師不僅可以從振動數(shù)據(jù)中辨別出特定的故障模式,而且還能使用其他傳感器模態(tài),來確定從檢測到癥狀到設(shè)備發(fā)生功能故障的時間——稱為“潛在到故障” (P-F) 間隔時間。例如,對于大多數(shù)機器而言,功耗、噪聲或熱量增加通常表明 P-F 間隔時間縮短(圖 1)。
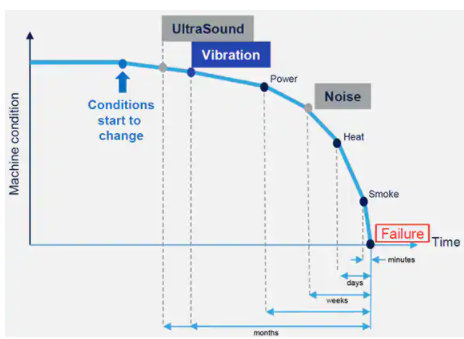
圖 1:不同傳感器模態(tài)可以揭示一些表明機器有可能發(fā)生故障的狀況,但通過振動分析通常可以實現(xiàn)早期檢測,有助于消除因突發(fā)故障而導(dǎo)致的停機事故。(圖片來源:STMicroelectronics)
為了捕獲這些額外的指標,工程師需要創(chuàng)建至少能夠捕獲振動、音頻、壓力、溫度和濕度的傳感器系統(tǒng)。然而,對于開發(fā)人員而言,將這些傳感器整合到一個穩(wěn)健設(shè)計中存在一些實際挑戰(zhàn),這可能會明顯拖延實現(xiàn)設(shè)備分析更大目標的進度。STMicroelectronics 的 STEVAL-BFA001V1B 開發(fā)套件及相關(guān)軟件提供了一個綜合性平臺,使得工程師可以快速啟動設(shè)備監(jiān)控和預(yù)測性維護的應(yīng)用開發(fā)工作。
參考平臺
STEVAL-BFA001V1B 套件既可作為參考設(shè)計,也可作為現(xiàn)成的解決方案,包含一塊用于預(yù)測性維護的工業(yè)傳感器板及相關(guān)軟件。該板是一個完整的獨立傳感器系統(tǒng)(圖 2)。它集 STMicroelectronics 高性能 32 位 Arm? Cortex?-M4 STM32F469 MCU 和全套傳感器于一體,包括前面提到的用于振動測量的 ISM330DLC 運動傳感器,以及 STMicroelectronics 的下列器件:
HTS221 溫度和濕度傳感器
LPS22HBTR 壓力傳感器
MP34DT05TR-A MEMS 麥克風

圖 2:基于 MCU 的工業(yè)傳感器板設(shè)計包含在 STMicroelectronics STEVAL-BFA001V1B 開發(fā)套件中,含有設(shè)備監(jiān)控通常需要的全套傳感器。(圖片來源:STMicroelectronics)
該系統(tǒng)為微控制器集成的 2 MB 閃存補充了 STMicroelectronics 的 M95M01-DF 1 Mb EEPROM,并通過 STMicroelectronics L6984A 開關(guān)穩(wěn)壓器和 LDK220 低壓差 (LDO) 穩(wěn)壓器提供電源管理功能。為了簡化工業(yè)環(huán)境中的部署,該板的一端有一個 M12 連接器,通過 ST L6362A IO-Link 收發(fā)器提供支持。該板的另一端有一個擴展連接器,供開發(fā)人員連接微控制器的 GPIO、模數(shù)轉(zhuǎn)換器 (ADC) 和 I2C 串行接口。結(jié)果得到一個穩(wěn)健的系統(tǒng),該系統(tǒng)僅比 M12 工業(yè)電纜略大,卻能滿足設(shè)備監(jiān)控的全套要求(圖 3)。
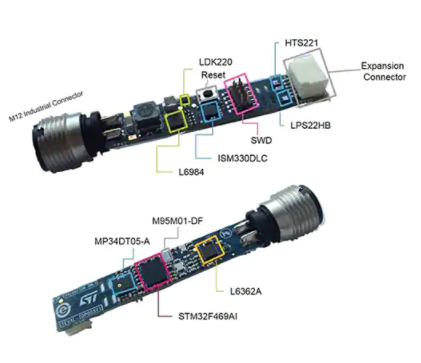
圖 3:STMicroelectronics STEVAL-BFA001V1B 工業(yè)傳感器板包括基于微控制器的多傳感器系統(tǒng)、擴展連接器、串行線調(diào)試 (SWD) 連接器和 M12 連接器,外形尺寸僅略大于工業(yè)電纜。(圖片來源:STMicroelectronics)
開發(fā)人員既可以使用套件中包含的 M12 電纜,也可以添加自己的 M12 連接器。該套件包括一個適配器板,用于將 M12 傳感器板的串行輸出連接到 ST-LINK/V2-1 接口,該接口隨 STMicroelectronics STM32 Nucleo-64 開發(fā)板一起提供。為了給該板供電,開發(fā)人員可以通過 M12 電纜自行供電,或?qū)?M12 電纜插入 ST STEVAL-IDP004V1 IO-Link 評估板。使用此 IO-Link 板是最快速的開發(fā)途徑,因為開發(fā)人員可以快速連接多個工業(yè)傳感器板,并使用 STMicroelectronics 基于 Windows 的 STEVAL-IDP005V1-GUI_v1.0 圖形用戶界面 (GUI) 進行配置(圖 4)。

圖 4:利用 ST Windows GUI,開發(fā)人員可以快速配置傳感器板,執(zhí)行數(shù)據(jù)收集,查看頻域和時域運動數(shù)據(jù)以及環(huán)境數(shù)據(jù)的結(jié)果。(圖片來源:STMicroelectronics)
在配置屏幕上完成設(shè)置之后,開發(fā)人員可轉(zhuǎn)到 VibraTIon Analysis(振動分析)屏幕進行數(shù)據(jù)收集。點擊開始按鈕后,開發(fā)人員可以查看 x 軸、y 軸和 z 軸上收集的振動頻率和轉(zhuǎn)速測量結(jié)果(圖 5)。在單獨的環(huán)境測量(ENV Measures(環(huán)境測量)選項卡)屏幕上,開發(fā)人員可以查看每個傳感器板收集的壓力、溫度和濕度數(shù)據(jù)。

圖 5:ST Windows GUI 提供了一種評估傳感器數(shù)據(jù)的簡單方法,能夠呈現(xiàn)運動傳感器的頻域和時域結(jié)果。(圖片來源:STMicroelectronics)
軟件開發(fā)
雖然通過 GUI 應(yīng)用可以快速訪問傳感器板的功能,但開發(fā)人員需要一種更靈活的方法,來創(chuàng)建自己的預(yù)測性維護應(yīng)用。針對定制開發(fā),STMicroelectronics 的 STSW-BFA001V1 軟件包提供了一整套 C 軟件模塊,包括驅(qū)動程序、庫和樣例應(yīng)用程序(圖 6)。
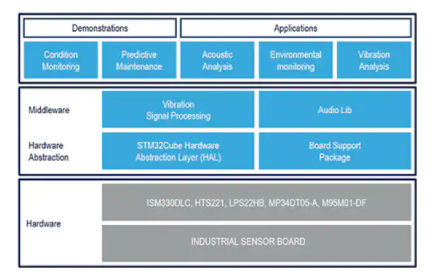
圖 6:ST STSW-BFA001V1 軟件分發(fā)提供了一整套驅(qū)動程序、中間件以及開發(fā)人員可立即運行的樣例應(yīng)用程序,后者可用作定制應(yīng)用的基礎(chǔ)。(圖片來源:STMicroelectronics)
STSW-BFA001V1 軟件包的軟件樣例中有一個狀態(tài)監(jiān)控應(yīng)用,該應(yīng)用演示了從運動傳感器收集數(shù)據(jù)并生成頻域、RMS 和峰值加速度值的過程。對于生產(chǎn)設(shè)計,開發(fā)人員可以將此數(shù)據(jù)上傳到旨在檢測故障的主機應(yīng)用。預(yù)測性維護應(yīng)用擴展了此數(shù)據(jù)收集基礎(chǔ),提供了用于生成潛在故障警告的功能。
這種方法有許多優(yōu)點,但最引人注目的是它能及早檢測到指示潛在故障的狀況,從而延長 P-F 間隔時間。另一個優(yōu)點是讓故障檢測更靠近設(shè)備,從而更直接地識別故障。
STMicroelectronics 預(yù)測性維護應(yīng)用展示了開發(fā)人員如何將傳感器讀數(shù)與速度、加速度、頻率分量的一系列閾值進行比較,從而執(zhí)行早期檢測。在生產(chǎn)系統(tǒng)中,閾值的選擇取決于多個因素,這些因素超出本文的討論范圍。
但重要的是,要注意有一些標準可供參考。例如,ISO 10816 為運行在四種不同工作區(qū)域的四類機器的振動值提供了指引,所述工作區(qū)域包括 A 區(qū)(良好)、B 區(qū)(滿意)、C 區(qū)(不適合連續(xù)工作)和 D 區(qū)(危急,連續(xù)工作可能造成損壞)。正如這些區(qū)域所表明的,當機器的振動水平達到 C 區(qū)時,應(yīng)向操作人員發(fā)出警告;當振動水平達到 D 區(qū)時,應(yīng)發(fā)出更緊急的警報。
STMicroelectronics 設(shè)計了預(yù)測性維護應(yīng)用,來支持這種特定使用模型。樣例應(yīng)用軟件集中的頭文件 (MoTIonSP_Threshold.h) 包括警告和警報級別的閾值。在這種情況下,STMicroelectronics 將警告閾值定義為 ISO 10816 介于 B 區(qū)和 C 區(qū)邊界之間的推薦操作值。警報閾值是 ISO 10816 介于 C 區(qū)和 D 區(qū)邊界之間的推薦操作值。典型的運動傳感器(如 STMicroelectronics ISM330DLC)提供 x、y、z 平面的數(shù)據(jù),因此針對每個被監(jiān)控量——RMS 速度、加速度和快速傅里葉變換 (FFT)——的警告和警報閾值均提供三個值。該應(yīng)用在四個不同的頻譜子范圍中使用 FFT 的閾值。
由此得到的一組閾值與各種不同的實際機器運行狀態(tài)一致。不過,開發(fā)人員仍然需要調(diào)整這些警告和警報閾值,使之與受監(jiān)控設(shè)備的具體特性以及警告和警報的總體目標匹配。
頭文件提供關(guān)于監(jiān)控的運行目標,而主例程 (main.c) 提供邏輯來檢測工業(yè)板傳感器所收集的數(shù)據(jù)中的閾值偏移。初始化硬件和相關(guān)軟件結(jié)構(gòu)之后,主例程便進入一個無限循環(huán),以生成振動數(shù)據(jù)的 FFT,測量 RMS 和峰值加速度,檢測閾值超越情況,并發(fā)送警告(清單 1)。
/* IniTIalize the moTIon sensor */
MotionSensorInit();
MotionSP_TimeDomainAlarmInit(&sTdAlarm,&sTimeDomainVal,&sTdRmsThresholds,&sTdPkThresholds);
MotionSP_FreqDomainAlarmInit(&FDWarnThresh,&FDAlarmThresh,&THR_Fft_Alarms,MotionSP_Parameters.subrange_num);
/****************************************************************************/
while (1)
{
/* Vibration Analysis */
MotionSP_Vibration_manager_run(&MotionSP_Parameters);
/* Status check during Time domain Analysis */
MotionSP_TimeDomainAlarm(&sTdAlarm,&sTimeDomainVal,
&sTdRmsThresholds,
&sTdPkThresholds,
&sTimeDomain);
if(FinishAvgFlag == 1)
{
SendVibrationResult();
TD_Thresholds_DataSend(&sTdAlarm,&sTimeDomainVal);
MotionSP_FreqDomainAlarm (&SRAmplitude, FDWarnThresh, FDAlarmThresh,
MotionSP_Parameters.subrange_num,
&THR_Check,
&THR_Fft_Alarms);
FD_Thresholds_DataSend(MotionSP_Parameters.subrange_num,
&SRBinVal,
&THR_Fft_Alarms,
&THR_Check);
MotionSP_TotalStatusAlarm(&sTdAlarm,
&THR_Fft_Alarms,
MotionSP_Parameters.subrange_num,
&TotalTDAlarm,
&TotalFDAlarm);
Thresholds_DataSend(&TotalTDAlarm, &TotalFDAlarm);
FinishAvgFlag = 0;
RestartFlag = 1;
// wait while the UART is transmitting
while((HAL_UART_GetState(&hSrvUart) & HAL_UART_STATE_BUSY_TX ) == HAL_UART_STATE_BUSY_TX);
strcpy((char *)SrvUartTxBuffer, “\r\n|#################### Next Measurement ####################\r\n”);
HAL_UART_Transmit(&hSrvUart, SrvUartTxBuffer, strlen((char *)SrvUartTxBuffer), SRV_UART_TIMEOUT_MAX);
MotionSP_TimeDomainAlarmInit(&sTdAlarm,&sTimeDomainVal,
&sTdRmsThresholds,&sTdPkThresholds);
MotionSP_FreqDomainAlarmInit(&FDWarnThresh,
&FDAlarmThresh,
&THR_Fft_Alarms,
MotionSP_Parameters.subrange_num);
/* Configure the Hardware using parameters in RAM */
MotionSP_Vibration_manager_init(&MotionSP_Parameters, 1);
Accelero_MeasurementInit();
}
}
清單 1:STMicroelectronics 預(yù)測性維護應(yīng)用演示了如何使用一個無限循環(huán),根據(jù)頻域和時域傳感器數(shù)據(jù)測量結(jié)果來識別和發(fā)送警報。(代碼來源:STMicroelectronics)
隨著循環(huán)繼續(xù)執(zhí)行,板級支持包中的傳感器驅(qū)動程序和服務(wù)處理程序讀取數(shù)據(jù),并填充由更高級別例程監(jiān)視的緩沖區(qū)。STMicroelectronics 樣例軟件在應(yīng)用級別分配處理程序,允許開發(fā)人員輕松換用自己的例程以滿足獨特的需求,而無需深入了解軟件架構(gòu)。
在主循環(huán)的每次迭代中,主例程調(diào)用 MotionSP_TimeDomainAlarm() 來檢查 RMS 速度和峰值加速度的閾值。對于頻域檢查,主循環(huán)重復(fù)調(diào)用 MotionSP_Vibration_manager_run(),后者間接調(diào)用另一個模塊的例程 MotionSP_FrequencyDomainProcess();如果所需的循環(huán)緩沖區(qū) (AccCircBuffer) 足夠滿并且 FFT 已啟用,它最終會調(diào)用中間件 FFT 計算例程(清單 2)。實際上,基本狀態(tài)監(jiān)控應(yīng)用也是使用這種模式。
/**
* @brief Frequency Domain Processing starting from the Circular Buffer
* @param pMotionSP_Parameters: Pointer to board parameters
* @return None
*/
void MotionSP_FrequencyDomainProcess(sMotionSP_Parameter_t *pMotionSP_Parameters)
{
#define FFTSIZEDELTA (MotionSP_Parameters.size*((100.0-MotionSP_Parameters.ovl)/100.0))
if (fftIsEnabled == 1) {
if (!accCircBuffIndexWaitForOvf) {
if (AccCircBuffer.IdPos 》= accCircBuffIndexForFft) {
MotionSP_FFT_All_Axes();
accCircBuffIndexForFft += FFTSIZEDELTA;
if (accCircBuffIndexForFft 》= AccCircBuffer.Size) {
accCircBuffIndexForFft -= AccCircBuffer.Size;
accCircBuffIndexWaitForOvf = 1;
}
}
}
else {
if (AccCircBuffer.Ovf) {
AccCircBuffer.Ovf = 0;
accCircBuffIndexWaitForOvf = 0;
}
}
}
}
清單 2:STMicroelectronics 樣例應(yīng)用程序的這個例程展示了一種使用循環(huán)緩沖區(qū)(其數(shù)據(jù)來自運動傳感器)進行頻域分析的機制。(代碼來源:STMicroelectronics)
在每個測量時期結(jié)束時,應(yīng)用程序使用另一個例程 (MotionSP_TotalStatusAlarm()) 來檢查運動數(shù)據(jù)的每個屬性,將頻域警報 (pTotalFDAlarm) 和時域警報 (pTotalTDAlarm) 設(shè)置為最大警報值(清單 3)。清單 1 中的主例程進而通過 UART 連接發(fā)送這些警報,然后重新初始化系統(tǒng)以開始下一個測量時期。
void MotionSP_TotalStatusAlarm(sTimeDomainAlarm_t *pTdAlarm,
sFreqDomainAlarm_t *pTHR_Fft_Alarms,
uint8_t subrange_num,
Alarm_Type_t *pTotalTDAlarm,
Alarm_Type_t *pTotalFDAlarm)
{
Alarm_Type_t TempAlarm = GOOD;
Alarm_Type_t TempFDAlarm = GOOD;
TempAlarm = MAX4(TempAlarm,
pTdAlarm-》PK_STATUS_AXIS_X,
pTdAlarm-》PK_STATUS_AXIS_Y,
pTdAlarm-》PK_STATUS_AXIS_Z);
TempAlarm = MAX4(TempAlarm,
pTdAlarm-》RMS_STATUS_AXIS_X,
pTdAlarm-》RMS_STATUS_AXIS_Y,
pTdAlarm-》RMS_STATUS_AXIS_Z);
for(int i=0; i《subrange_num; i++)
{
TempFDAlarm = MAX4(TempFDAlarm,
pTHR_Fft_Alarms-》STATUS_AXIS_X[i],
pTHR_Fft_Alarms-》STATUS_AXIS_Y[i],
pTHR_Fft_Alarms-》STATUS_AXIS_Z[i]);
}
*pTotalTDAlarm = TempAlarm;
*pTotalFDAlarm = TempFDAlarm;
}
清單 3:STMicroelectronics 樣例應(yīng)用程序展示了在預(yù)測性維護應(yīng)用中使用多個警報源的基本設(shè)計模式。(代碼來源:STMicroelectronics)
運用 STMicroelectronics 樣例應(yīng)用程序,開發(fā)人員可以快速評估預(yù)測性維護特性和功能。更直接的是,開發(fā)人員只需通過終端仿真程序連接到工業(yè)傳感器板,便可立即開始查看測量值和警告/警報狀態(tài)。
但對于生產(chǎn)應(yīng)用,開發(fā)人員更可能使用傳感器板的串行接口連接上游資源,以實現(xiàn)更高級的應(yīng)用監(jiān)視和控制。主要云服務(wù)提供商已經(jīng)為預(yù)測性維護提供了先進的機器學習解決方案。例如,Microsoft Azure 的物聯(lián)網(wǎng)解決方案加速器組合中便有一款預(yù)測性維護解決方案。
開發(fā)人員甚至可以提前開始使用 Azure 加速器,因為其中包含的仿真設(shè)備能夠呈現(xiàn)從 NASA 噴氣發(fā)動機獲取的多個傳感器數(shù)據(jù)流。在此加速器工具鏈的末端,Azure 機器學習服務(wù)提供一個基于此數(shù)據(jù)而訓(xùn)練的模型。在某些情況下,開發(fā)人員可以采用遷移學習方法,將一個預(yù)訓(xùn)練模型(如 Azure 預(yù)測性維護模型)用作自己的定制機器學習模型的起點。
結(jié)語
為了滿足業(yè)界對預(yù)測性維護日益濃厚的興趣,開發(fā)人員需要能夠快速部署適用于工業(yè)環(huán)境的、穩(wěn)健的多傳感器系統(tǒng)。STMicroelectronics 的全面開發(fā)解決方案既有硬件傳感器板,又有專門針對預(yù)測性維護要求而設(shè)計的軟件環(huán)境。
使用此系統(tǒng)解決方案,開發(fā)人員可以立即開始評估預(yù)測性維護,快速開發(fā)自己的預(yù)測性維護應(yīng)用,并利用新興的基于云的機器學習資源來創(chuàng)建更高級的預(yù)測性維護功能。
中國傳動網(wǎng)版權(quán)與免責聲明:凡本網(wǎng)注明[來源:中國傳動網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國傳動網(wǎng)(www.siyutn.com)獨家所有。如需轉(zhuǎn)載請與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個人轉(zhuǎn)載使用時須注明來源“中國傳動網(wǎng)”,違反者本網(wǎng)將追究其法律責任。
本網(wǎng)轉(zhuǎn)載并注明其他來源的稿件,均來自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請保留稿件來源及作者,禁止擅自篡改,違者自負版權(quán)法律責任。
產(chǎn)品新聞
更多>
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11

rpi-image-gen:樹莓派軟件鏡像構(gòu)建的終...
2025-04-08

【產(chǎn)品解讀】全面提升精密制造檢測節(jié)拍...
2025-03-31
網(wǎng)站簡介|會員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見反饋|sitemap
傳動網(wǎng)-工業(yè)自動化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號 | 營業(yè)執(zhí)照證書 | 不良信息舉報中心 |  粵公網(wǎng)安備 44030402000946號
粵公網(wǎng)安備 44030402000946號












 網(wǎng)站客服
網(wǎng)站客服