首é |資訊|產å“|ä¼æ¥|å“牌|商機|技術|專題|è¦–é »|展會|媒體|論壇|下載

 您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
技術百科
>
英飛凌電æºç®¡ç†èŠ¯ç‰‡TLF35584的使用介紹
您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
技術百科
>
英飛凌電æºç®¡ç†èŠ¯ç‰‡TLF35584的使用介紹
時間:2024-03-12 13:55:18來æºï¼šåµŒå…¥å¼ç¨‹åºçŒ¿
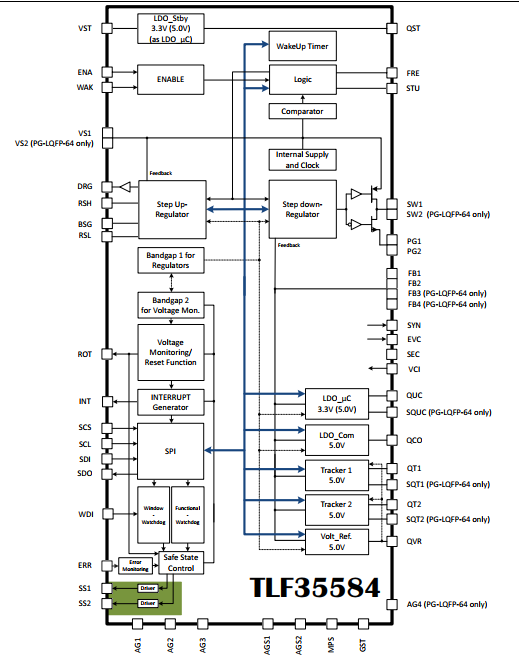
TLF35584是英飛凌推出的é‡å°è»Šè¼›å®‰å…¨æ‡‰ç”¨çš„é›»æºç®¡ç†èŠ¯ç‰‡ï¼Œç¬¦åˆASIL D安全ç‰ç´šè¦æ±‚,具有高效多電æºè¼¸å‡ºé€šé“,寬電壓輸入范åœ,æ ¹æ“šä¸åŒçš„型號有3.3Vå’Œ5.0V兩種命å。å¯ä»¥ç‚ºMCUæä¾›600mAçš„é›»æºï¼Œå¯ä»¥æä¾›200mAçš„é›»æºçµ¦é€šä¿¡ï¼Œé‚„å¯ä»¥æ供精確的åƒè€ƒé›»å£“給ADC使用,具有SPI通信,å¯ä»¥ç›£æŽ§å’Œé…置該芯片。我們以TLF35584QVVS2型號的使用來åšä»‹ç´¹ã€‚TLF35584çš„å°è£é¡žåž‹ä»¥åŠé›»å£“分類如下表所示:

TLF35584系統框圖
管腳介紹
| Pin | Symbol | Function |
| 1 | BSG | Boost driver ground: Connect this pin to ground at the low side of an external current sense resistorto decouple the driver noise from the sensitive ground. If step up pre regulator option is not used, connect to ground. |
| 2 | VST | Supply voltage standby regulator, input: Connect this input to supply (battery) voltage with reverse protection diodeand capacitor between pin and ground. An EMCfilter is recommended. |
| 3 | ENA | Enable Input: A positive edge signal at this pin will wake the device. In case of not used connect to ground. |
| 4 | WAK | Wake/Inhibit Input: A high level signal of defined length at this pin will wake the device. In case of not used, connect to ground |
| 5 | QST | Output standby LDO: Connect a capacitor as close as possible to pin. |
| 6 | AG1 | Analogue ground, pin 1: Connect this pin directly (low ohmic and low inductive) to ground. |
| 7 | AG2 | Analogue ground, pin 2: Connect this pin directly (low ohmic and low inductive) to ground. |
| 8 | AGS1 | Analogue ground, safety, pin 1: Connect this pin directly (low ohmic and low inductive) to ground. In case a safety switch is used, connect directly to the source of the NMOS used. |
| 9 | AGS2 | Analogue ground, safety, pin 2: Connect this pin directly (low ohmic and low inductive) to ground. In case a safety switch is used, connect directly to the source of the NMOS used. |
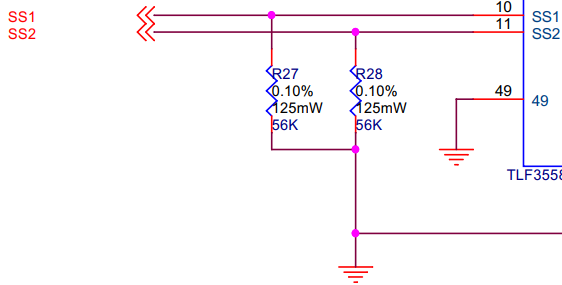
| 10 | SS2 | Safe state signal 2: Safe state output signal 2, sets the application into a safe state. Signal is delayed against SS1, delay canbe adjusted via SPI command. |
| 11 | SS1 | Safe state signal 1: Safe state output signal 1, sets the application into a safe state. |
| 12 | SDI | Serial peripheral interface, signal data input: SPI signalling port, connect to SPI port “data output†of micro processor to receive commands during SPI communication. |
| 13 | SDO | Serial peripheral interface, signal data output: SPI signalling port, connect to SPI port “data input†of micro processor to send status information during SPI communication. |
| 14 | SCL | Serial peripheral interface, signal clock: SPI signalling port, connect to SPI port “clock†of micro processor to clock the device for SPI communication. |
| 15 | SCS | Serial peripheral interface, signal chip select: SPI signalling port, connect to SPI port “chip select†of micro processor to address the device for SPI communication. |
| 16 | WDI | Watchdog input, trigger signal: Input for trigger signal, connect the “trigger signal output†of the micro processor to this pin. In case of not used, leave open (internal pull-down). |
| 17 | ROT | Reset output: Open drain structure with internal pull-up current source. A low signal at this pin indicates a reset event. |
| 18 | INT | Interrupt signal: Push-pull-stage. A low pulse at this pin indicates an interrupt, the micro processor shall read out the SPI status registers. Connect to a non maskable interrupt port (NMI) of the micro processor core supply voltage. |
| 19 | SYN | Synchronization output signal: Connect this output to the optional external switch mode post regulator synchronization input. The signal delivers the step down regulator switching frequency either in phase or shifted by 180° (selectable via SPI command). The switch mode post regulator shall synchronize to the rising edge. If not used, leave open. |
| 20 | ERR | Error signal input: Input for error signal from micro processor safety managing unit (SMU, internal failure detection of the micro processor). Connect the “error signal output†of the micro processor to this pin. |
| 21 | EVC | Enable external post regulator for core supply: Connect this pin to the enable input of the external post regulator. If not used, leave open. |
| 22 | MPS | Microcontroller programming support pin: Pull down this pin to ground for operation. Optionally, this pin can be used for microcontroller debugging and programming purposes. For details please refer to Chapter 11.7. |
| 23 | SEC | Configuration pin for external post regulator for core supply: Connect this pin to ground if the option external post regulator is not used. If the option external post regulator is used, leave open. |
| 24 | FRE | Frequency adjustment pin: Connect pin to ground for low frequency range or leave open for high frequency range. |
| 25 | STU | Configuration pin for step up converter: Connect this pin to ground if the option step up pre regulator is not used. If the option step up pre regulator is used, leave open. |
| 26 | VCI | Input for optional external post regulator output voltage (core supply): Connect an external resistor divider to adjust the over and under voltage thresholds of reset output signal ROT. If the option external post regulator is not used, leave open. |
| 27 | GST | Gate stress pin: Not for customer use. Connect this pin directly (low ohmic and low inductive) to ground. |
| 28 | AG3 | Analogue ground, pin 3: Connect this pin directly (low ohmic and low inductive) to ground. |
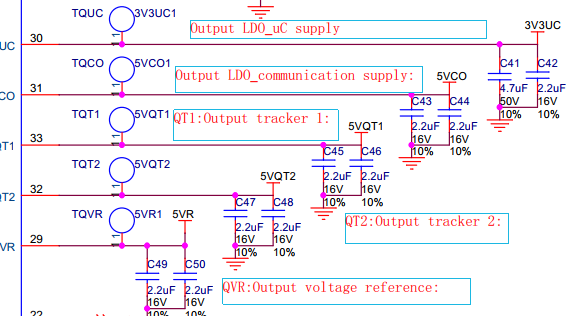
| 29 | QVR | Output voltage reference: Connect a capacitor as close as possible to pin. |
| 30 | QUC | Output LDO_uC supply (micro processor supply): Connect a capacitor as close as possible to pin. |
| 31 | QCO | Output LDO_communication supply: Connect a capacitor as close as possible to pin. |
| 32 | QT2 | Output tracker 2: Connect a capacitor as close as possible to pin. |
| 33 | QT1 | Output tracker 1: Connect a capacitor as close as possible to pin. |
| 34 | N.C. | Internally not connected: This pin is electrically not connected internally and can be kept open/floating, connected to GND or any other signal. Consider neighboring signals for potential failures. |
| 20 | ERR | Error signal input: Input for error signal from micro processor safety managing unit (SMU, internal failure detection of the micro processor). Connect the “error signal output†of the micro processor to this pin. |
| 21 | EVC | Enable external post regulator for core supply: Connect this pin to the enable input of the external post regulator. If not used, leave open. |
| 22 | MPS | Microcontroller programming support pin: Pull down this pin to ground for operation. Optionally, this pin can be used for microcontroller debugging and programming purposes. For details please refer to Chapter 11.7. |
| 23 | SEC | Configuration pin for external post regulator for core supply: Connect this pin to ground if the option external post regulator is not used. If the option external post regulator is used, leave open. |
| 24 | FRE | Frequency adjustment pin: Connect pin to ground for low frequency range or leave open for high frequency range. |
| 25 | STU | Configuration pin for step up converter: Connect this pin to ground if the option step up pre regulator is not used. If the option step up pre regulator is used, leave open. |
| 26 | VCI | Input for optional external post regulator output voltage (core supply): Connect an external resistor divider to adjust the over and under voltage thresholds of reset output signal ROT. If the option external post regulator is not used, leave open. |
| 27 | GST | Gate stress pin: Not for customer use. Connect this pin directly (low ohmic and low inductive) to ground. |
| 28 | AG3 | Analogue ground, pin 3: Connect this pin directly (low ohmic and low inductive) to ground. |
| 29 | QVR | Output voltage reference: Connect a capacitor as close as possible to pin. |
| 30 | QUC | Output LDO_uC supply (micro processor supply): Connect a capacitor as close as possible to pin. |
| 31 | QCO | Output LDO_communication supply: Connect a capacitor as close as possible to pin. |
| 32 | QT2 | Output tracker 2: Connect a capacitor as close as possible to pin. |
| 33 | QT1 | Output tracker 1: Connect a capacitor as close as possible to pin. |
| 34 | N.C. | Internally not connected: This pin is electrically not connected internally and can be kept open/floating, connected to GND or any other signal. Consider neighboring signals for potential failures. |
| 46 | DRG | Driver output for external step up regulator power stage, connect to gate: Gate of low side switch of step up pre regulator: Connect to the gate of an external N-channel mosfet, line to be straight and as short as possible. If step up pre regulator option is not used, leave open. |
| 47 | RSH | Sense resistor for external step up regulator power stage, high side: Connect this pin to the high side of an external current sense resistor to determine the maximum current threshold through the external N-channel mosfet. If step up pre regulator option is not used, connect to ground. |
| 48 | RSL | Sense resistor for external step up regulator power stage, low side: Connect this pin to the low side of an external current sense resistor to determine the maximum current threshold through the external N-channel mosfet. If step up pre regulator option is not used, connect to ground. |
| EP1 | Edge pin no 1: Keep area below this pin free of ground or other signals, do not solder this pin to ground or any other signal. This pin must be kept free of soldering. | |
| EP2 | Edge pin no 2: Keep area below this pin free of ground or other signals, do not solder this pin to ground or any other signal. This pin must be kept free of soldering. | |
| EP3 | Edge pin no 3: Keep area below this pin free of ground or other signals, do not solder this pin to ground or any other signal. This pin must be kept free of soldering. | |
| EP4 | Edge pin no 4: Keep area below this pin free of ground or other signals, do not solder this pin to ground or any other signal. This pin must be kept free of soldering. | |
| Coolin g Tab | GND | Cooling Tab. Connect externally to GND and heat sink area. |
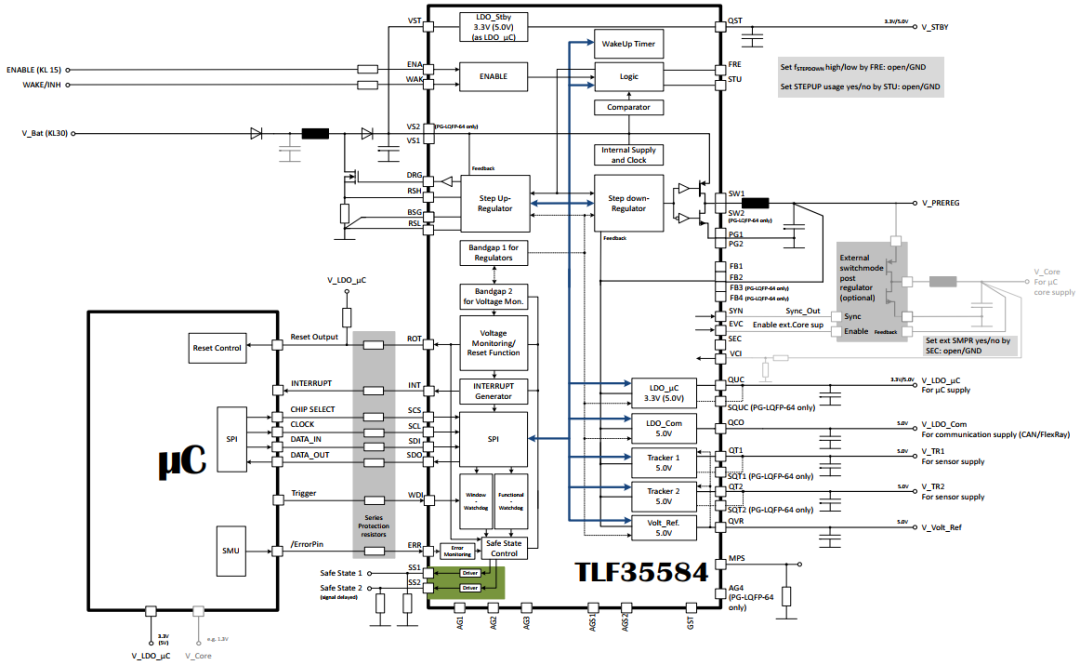
典型應用框圖
安全功能
TLF35584æ供了很多安全功能來ä¿è‰ç³»çµ±çš„安全
輸出電æºè»Œç›£æŽ§
Vprereg
VQUC
VQST
VQVR
VVCI
VQT1, VQT2
VQCO
æä¾›MCU外部安全機制的時åºæ™‚間監控æœå‹™
監控MCU的SMU ERR輸出功能
監控MCU的看門狗輸出æœå‹™
二次安全關斷能力
TSR
TSR01 -在所有產生和監控的輸出電壓上檢測和響應故障。é•å將會導致系統級的單點失效
TSR02 -檢測并響應MCU安全管ç†å–®å…ƒ(SMU)的錯誤觸發。é•å會導致潛ä¼å¤±æ•ˆæˆ–者多點失效
TSR03 -檢測并響應由MCU錯誤觸發的定時監控æœå‹™ï¼Œé•å會導致潛ä¼å¤±æ•ˆæˆ–者多點失效
TSR04 -內部需è¦æ™‚激活二次關斷信號,é•åTSR04å¯èƒ½æœƒå°Žè‡´æ½›ä¼å¤±æ•ˆ
安全功能應用
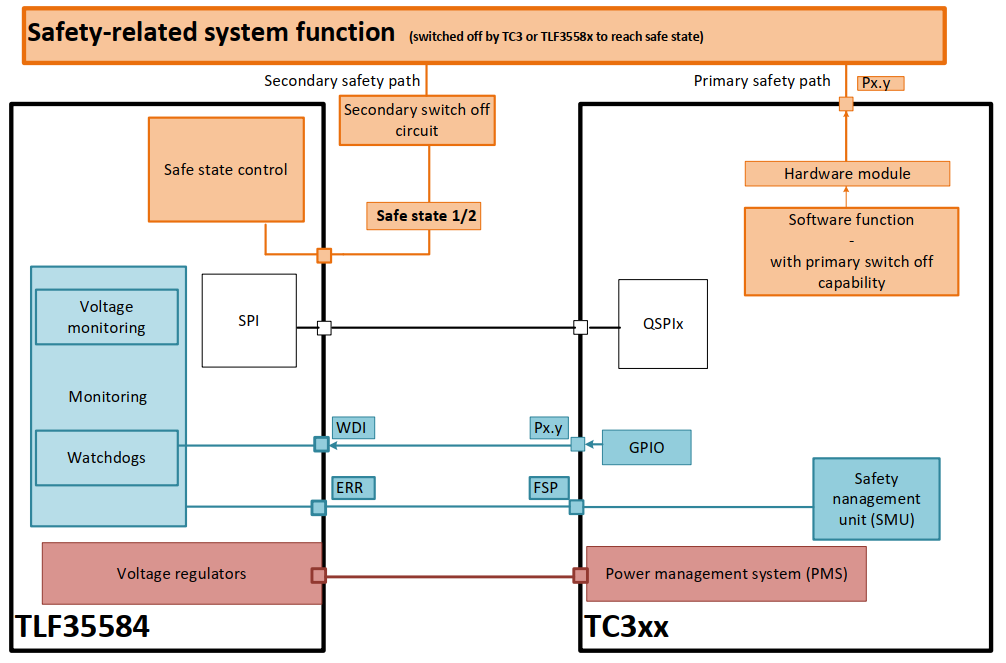
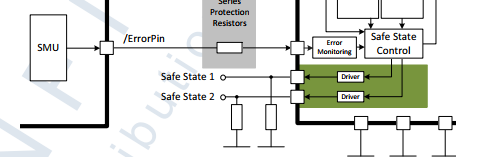
安全路徑
安全路徑是信號éˆå’Œé›»è·¯ä½¿èƒ½å¹¶ç¶æŒç³»çµ±çš„安全狀態。å°äºŽä¸€äº›TLF35584目標應用,é”到了安全狀態
通éŽç¦ç”¨åŸ·è¡Œå™¨ã€é€šä¿¡é€šé“或整個系統。在這樣的系統ä¸ï¼Œå®‰å…¨è·¯å¾‘是安全åœæ©Ÿè·¯å¾‘。
首è¦å®‰å…¨è·¯å¾‘
主è¦å®‰å…¨è·¯å¾‘ä¸æ˜¯ç”±PMIC管ç†çš„,而是由MCUå–®ç‰‡æ©ŸæŽ§åˆ¶çš„ã€‚å› æ¤ï¼Œä¸»å®‰å…¨è·¯å¾‘ä¸ä¾è³´äºŽPMIC的安全é‚輯。通常,這類安全路徑是通éŽå®‰å…¨MCU建立的。該單片機å¯ä»¥ä½¿æ‡‰ç”¨ç¨‹åºå§‹çµ‚處于安全狀態,使用的æ¢ä»¶åœ¨æœ‰æ•ˆèŒƒåœå…§ï¼Œå¤–部安全機制å¯ç”¨ã€‚
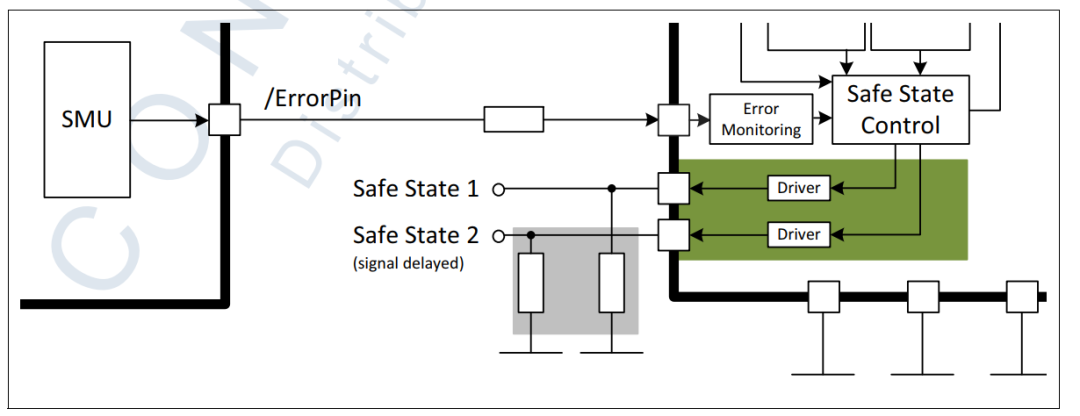
二次安全路徑
二次安全路徑或者å«äºŒæ¬¡é—œæ–·è·¯å¾‘是通éŽPMIC的安全功能實ç¾çš„。在PMIC的安全功能TSR需求ä¸ï¼Œç³»çµ±çš„安全狀態是通éŽPMIC的安全狀態輸出é”到的,也就是說通éŽTLF35584çš„SS1å’ŒSS2輸出連接到系統電路å¯ä»¥é‡‹æ”¾æˆ–者進入安全狀態,這種機制å¯ä»¥åœ¨æª¢æ¸¬åˆ°é—œéµå¤±æ•ˆæ™‚候進入安全狀態已é”到安全目標。
安全狀態
系統的安全狀態被èªç‚ºæ˜¯æ²’有任何ä¸åˆç†çš„高水平風險的é‹è¡Œæ¨¡å¼
Assumption:[SM_00_01]
åªè¦TLF35584處于安全狀態(通éŽæ¿€æ´»äºŒæ¬¡å®‰å…¨é—œæ©Ÿè·¯å¾‘,å³SS1/SS2處于低電平表示),則å系統處于安全狀態。
TLF35584包括許多安全è¨è¨ˆåŠŸèƒ½å’Œå®‰å…¨æ©Ÿåˆ¶ï¼Œä»¥æ”¯æŒå¯¦ç¾æŠ€è¡“安全分æžç¸½çµå ±å‘Šä¸å®šç¾©çš„安全級別的安全è¦æ±‚.
安全特性
安全特性概覽
安全特性如下圖ä¸æ¨™ç´…色部分所示
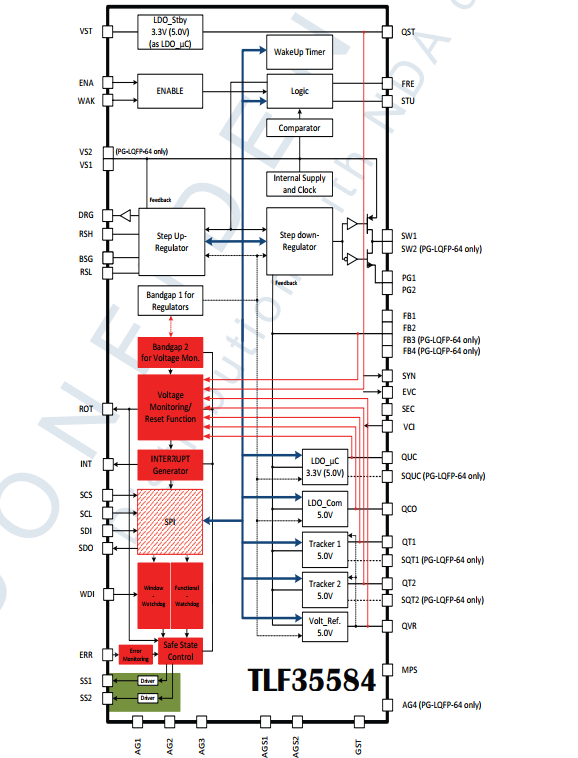
輸出電壓監控
TLF35584為所有輸出æ供了ç¨ç«‹çš„é›»æºç›£æŽ§åŠŸèƒ½ï¼Œæ¯ä¸€è·¯è¼¸å‡ºéƒ½åŒ…å«ç¨ç«‹çš„éŽå£“å’Œæ¬ å£“ç›£æŽ§
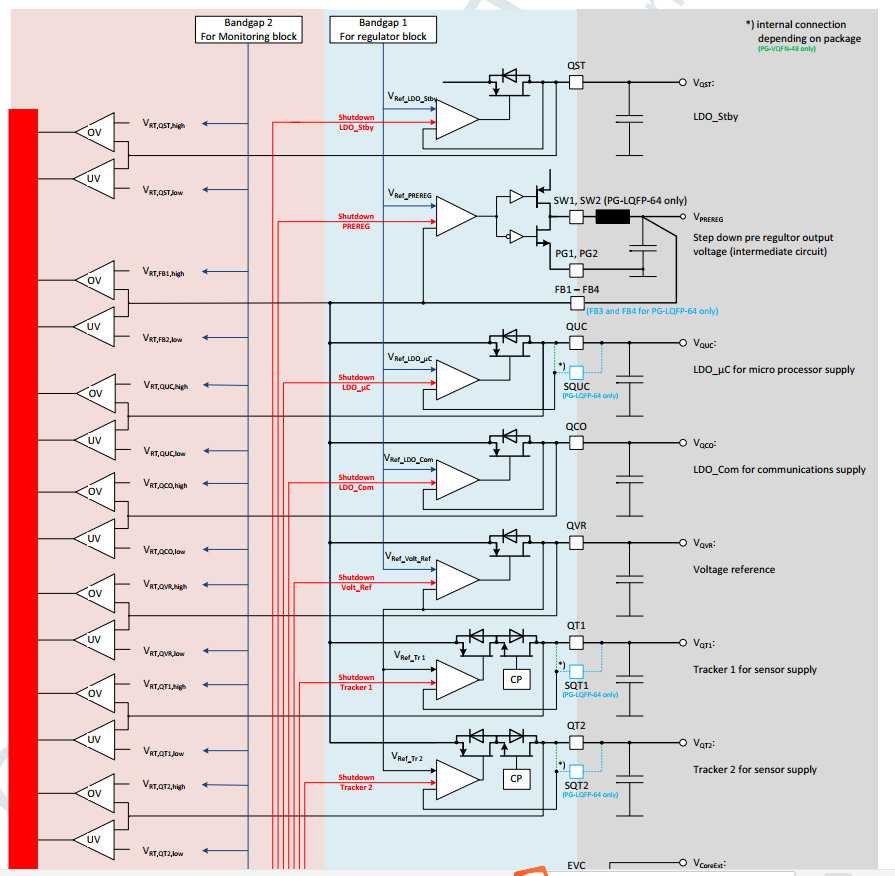
帶隙基準和內部電壓監控
所有的內部電壓也會被監控,如果出ç¾ç•°å¸¸æœƒé€²å…¥POWNDOWN狀態。TLF35584包å«å…©è·¯äº’相ç¨ç«‹çš„帶隙基準åƒè€ƒé›»å£“互相監控å°æ–¹çš„æ“作。如果超éŽæŸä¸€é è¨çš„é–€é™å€¼ï¼ŒTLF35584將會產生一個ä¸æ–·çµ¦åˆ°å¤–部,MCUå¯ä»¥åˆ©ç”¨é€™å€‹ä¸æ–·åšä¸€äº›éŸ¿æ‡‰ã€‚
熱關斷
TLF35584包å«ç†±ç›£æŽ§ä»¥ä¿è·è¨å‚™åœ¨é«˜æº«æ¢ä»¶ä¸‹æ壞,內部有多點的溫度ä¿è·ä¾†é˜²æ¢å™¨ä»¶æ壞,如果檢測到éŽæº«ï¼Œæœƒç”¢ç”Ÿä¸æ–·çµ¦åˆ°MCU, MCU應當作出一些åæ˜ ï¼Œå¦‚å¯ä»¥é—œæ–·æŸè·¯é›»æºè¼¸å‡ºã€‚
錯誤管腳監控
TLF35584æ供一個å¯ä»¥é€šéŽERR腳監控MCU的安全管ç†å–®å…ƒSMU,一個é å®šç¾©çš„é »çŽ‡èŒƒåœçš„ç¿»è½‰æ–¹æ³¢ä¿¡è™Ÿå¿…é ˆçµ¦åˆ°TLF35584çš„ERR腳,如果是超éŽé »çŽ‡èŒƒåœçš„信號給到ERRè…³æœƒå¼•èµ·å ±æ•…éšœï¼ŒTLF35584將會進入INT狀態。默èªæƒ…æ³ä¸‹ERR腳功能是使能的。
窗å£çœ‹é–€ç‹—
TLF35584包å«ä¸€å€‹çª—å£çœ‹é–€ç‹—來監控MCUçš„é‹è¡Œï¼Œéœ€è¦ä¸€å®šé–“隔內收到觸發信號,å¯ä»¥é€šéŽWDI腳或者SPI,在一定的開窗時間內或者超時觸發都會被èªç‚ºæ˜¯ç„¡æ•ˆçš„çœ‹é–€ç‹—è§¸ç™¼ï¼Œç„¡æ•ˆçœ‹é–€ç‹—è§¸ç™¼äº‹ä»¶å°‡æœƒå¼•èµ·å…§éƒ¨éŒ¯èª¤è¨ˆæ•¸å™¨åŠ 2,并且產生ä¸æ–·ï¼Œæœ‰æ•ˆçš„看門狗觸發事件將會引起錯誤計數減1,如果錯誤計數器超éŽé…置的門é™å€¼ï¼ŒTLF35584將會跳轉到INT狀態。默èªæ¢ä»¶ä¸‹çª—å£çœ‹é–€ç‹—是使能的,需è¦æ³¨æ„的是窗å£çœ‹é–€ç‹—和功能看門狗是相互ç¨ç«‹çš„,å¯ä»¥åŒæ™‚使能使用。
功能看門狗
功能看門狗ç¨å¾®å¾©é›œä¸€äº›ï¼Œä¹Ÿå«å•ç”看門狗,通éŽå¤šå€‹SPI通信幀完æˆã€‚TLF35584產生一個å•é¡Œï¼ŒåŒæ™‚心跳計數器開始從0å‘上計數,直到心跳周期çµæŸï¼Œå¿ƒè·³å‘¨æœŸå¯ä»¥é€šéŽSPI調整é…置,4個å—節的響應ç”æ¡ˆå¿…é ˆåœ¨å¿ƒè·³å‘¨æœŸçµæŸä¹‹å‰æ”¶åˆ°ã€‚最åŽä¸€å€‹æ”¶åˆ°çš„éŸ¿æ‡‰å¿…é ˆåŒæ¥å¯«å…¥åŒæ¥å¯„å˜å™¨ä»¥å¾©ä½å¿ƒè·³è¨ˆæ•¸å™¨ã€‚如果接收到æ£ç¢ºçš„ç”案響應,èªç‚ºæ˜¯ä¸€æ¬¡æœ‰æ•ˆçš„看門狗觸發事件,有效的看門狗觸發事件會導致內部錯誤計數器減1ï¼Œç„¡æ•ˆçš„çœ‹é–€ç‹—è§¸ç™¼äº‹ä»¶å°‡æœƒå°Žè‡´å…§éƒ¨éŒ¯èª¤è¨ˆæ•¸å™¨åŠ 2,并且產生ä¸æ–·ã€‚如果錯誤計數器超éŽé è¨çš„é–€é™å€¼ï¼Œå°‡æœƒè·³è½‰åˆ°INT狀態。默èªæƒ…æ³ä¸‹åŠŸèƒ½çœ‹é–€ç‹—是ç¦æ¢çš„,和窗å£çœ‹é–€ç‹—å¯ä»¥ç¨ç«‹ä½¿ç”¨ï¼Œäº’ä¸å¹²æ¶‰ã€‚
二次安全關斷能力
TLF35584具有二次安全關斷能力,在應用ä¸å®‰å…¨ç‹€æ…‹è¼¸å‡ºå¼•è…³SS1å’ŒSS2的狀態用來表明è¨å‚™çš„安全狀態。
軟錯誤檢測和修æ£
TLF35584通éŽä¸€äº›å¯„å˜å™¨æ供了軟錯誤的檢測和修æ£å®‰å…¨æ©Ÿåˆ¶ï¼ŒåŒ…括單個ä½éŒ¯èª¤çš„檢測和修æ£ï¼Œä»¥åŠå…©å€‹ä½éŒ¯èª¤çš„檢測。兩個ä½éŒ¯èª¤æœƒå¼•èµ·ä¸æ–·ã€‚
安全機制軟件需求
TLF35584在安全相關應用ä¸ç”¨ä½œå¾®è™•ç†å™¨é›»æºã€‚å®‰å…¨æ©Ÿåˆ¶å¿…é ˆç”±ç›¸æ‡‰çš„å¾®è™•ç†å™¨åŸ·è¡Œï¼Œä»¥ä¿è‰ç³»çµ±çš„æ£ç¢ºé‹è¡Œã€‚
SPI通信
來自微處ç†å™¨çš„SPI通信用于é…ç½®TLF35584,æœå‹™çœ‹é–€ç‹—和監控狀態寄å˜å™¨ï¼Œç”±äºŽSPI通信是用來傳輸安全相關信æ¯çš„ï¼Œå› æ¤éœ€è¦é‡‡å–措施ä¿è‰å…¶æ•¸æ“šçš„完整性
奇å¶æ ¡é©—
Assumption: [SM_SPI_01]
SPI通信ä¸çš„奇å¶æ ¡é©—ä½ç‚ºæ¯æ¬¡é€šä¿¡é€²è¡Œæª¢æŸ¥ã€‚具有無效奇å¶æ ¡é©—ä¿¡æ¯çš„æ•¸æ“šå¿…é ˆè¢«å¿½ç•¥ã€‚
奇å¶æ ¡é©—ä½åœ¨SPI期間防æ¢å–®æ¯”特故障和奇數比特錯誤的故障æºé€šã€‚為了æ供更全é¢çš„誤差覆蓋范åœï¼Œå¯ä»¥è€ƒæ…®é¡å¤–的措施。如果在讀æ“作éŽç¨‹ä¸å¥‡å¶æ ¡é©—ä¿¡æ¯ä¸æ£ç¢ºï¼Œå¾®è™•ç†å™¨å¿…é ˆå¿½ç•¥æ•¸æ“šå’Œé‡åšè®€æ“作
如果寫æ“作éŽç¨‹ä¸çš„æ ¡é©—ä¿¡æ¯ä¸æ£ç¢ºï¼ŒTLF35584將忽略該數據并產生ä¸æ–·ã€‚微處ç†å™¨æ‡‰è©²éŸ¿æ‡‰ä¸æ–·å¹¶æª¢æŸ¥ä¸æ–·æºï¼Œå³æª¢æŸ¥æ˜¯å¦SPI.PAREä½ç½®ä½ã€‚如果寫æ“作失敗,微處ç†å™¨æ‡‰è©²é‡å¾©é€™å€‹æ“作。
é…ç½®
Assumption: [SM_SPI_02]
write-verify-applyéŽç¨‹ç”¨äºŽå°å®‰å…¨ç›¸é—œé…置的寫訪å•ã€‚å› æ¤ï¼Œæ•¸æ“šæ‡‰æ˜¯åœ¨å¯«å…¥æ•¸æ“šä¹‹åŽå’Œæ‡‰ç”¨äºŽæ‡‰ç”¨ç¨‹åºä¹‹å‰é€²è¡Œé©—è‰ã€‚é 期é…置的驗è‰è‡³å°‘æ¯æ¬¡é…ç½®æ ¡é©—ä¸€æ¬¡ï¼Œå¹¶æ ¹æ“šæ‡‰ç”¨ç¨‹åºå¯ä»¥é‡æ–°é…置。
所有與安全相關的é…置寄å˜å™¨(稱為“å—ä¿è·çš„寄å˜å™¨â€)都由定義的LOCK/UNLOCKéŽç¨‹ï¼Œå…許在數據激活之å‰å°å…¶é€²è¡Œé©—è‰ã€‚
清除狀態和ä¸æ–·å¯„å˜å™¨
所有狀態和ä¸æ–·æ¨™å¿—在清除之å‰è¢«æ£ç¢ºè®€å–。掛起的ä¸æ–·æ²’有æ£ç¢ºæ¸…除æœå‹™
ä¸æ–·ä¿¡è™Ÿ
Assumption: [SM_INT_01]
æ ¹æ“šå…·é«”çš„æ‡‰ç”¨ï¼Œåœ¨å°‡ä¸æ–·ä¿¡è™Ÿç”¨ä½œå®‰å…¨åŠŸèƒ½çš„應用ä¸ï¼Œå°æ¯å€‹ä¸æ–·ä¿¡è™Ÿçš„æ£ç¢ºåŠŸèƒ½é€²è¡Œé©—è‰ã€‚
ä¸æ–·çš„處ç†ï¼Œç•¶ç”¢ç”Ÿä¸æ–·ï¼Œæ‡‰éµå¾ªï¼š
å¯ä»¥å¯¦æ–½è¶…時,其到期應視為測試失敗。æŒçºŒæ™‚é–“è¶…æ™‚æ™‚é–“æ‡‰æ ¹æ“šæ‰€é¸æ“‡çš„ä¸æ–·æºè¨ç½®
讀å–ä¸æ–·ç‹€æ…‹å¯„å˜å™¨å¹¶é©—è‰ä¸æ–·æ¨™å¿—是å¦èˆ‡ç”Ÿæˆçš„特定ä¸æ–·ç›¸åŒ¹é…
ä¸æ–·éŸ¿æ‡‰
Assumption: [SM_INT_02]
微處ç†å™¨æª¢æŸ¥æ¯å€‹ä¸æ–·äº‹ä»¶çš„ä¸æ–·æºï¼Œå¹¶æ ¹æ“šæ‡‰ç”¨ç¨‹åºåšå‡ºå應è¦æ±‚。
Assumption: [SM_INT_03]
如果通éŽä¸æ–·ç‹€æ…‹æ¨™å¿—SYSSF.CFGE檢測到一個é…置錯誤,MCU應該å°è¨å‚™é€²è¡Œé‡æ–°é…ç½®
復ä½è¼¸å‡ºä½¿ç”¨
Assumption: [SM_ROT_01]
TLF35584的復ä½è¼¸å‡ºè…³ROT連接到MCU的復ä½è¼¸å…¥å¼•è…³ï¼Œç•¶æœ‰å¾©ä½å¼•è…³è¼¸å‡ºï¼Œä¸»è¦å®‰å…¨è·¯å¾‘激活。
備用Stand-by LDO使用
Assumption: [SM_SBL_01]
在備用LDO用作微控制器的å˜å„²å™¨é›»æºä¾›çµ¦æ™‚,需è¦æ¯å€‹å‘¨æœŸç¢ºèªé©—è‰ä¸‹æ¤LDO是å¦å®‰å…¨ã€‚
ç¨ç«‹çš„二次安全關斷路徑
Assumption: [SM_SS_01]
å¿…é ˆç¢ºä¿ä¸»è¦å®‰å…¨é—œæ–·è·¯å¾‘和二次安全關斷路徑的ç¨ç«‹æ€§ï¼Œä¸èƒ½å˜åœ¨ä»»ä½•çš„ä¾è³´é—œç³»ã€‚
一次關斷路徑或者腳主è¦é—œæ–·è·¯å¾‘ç”±MCU控制。
Assumption: [SM_SS_02]
在將二次關斷路徑用作安全功能的應用ä¸ï¼Œæ ¹æ“šä¸åŒçš„應用,è¦é©—è‰å…¶æ£ç¢ºçš„功能,æ¯å€‹å‘¨æœŸè‡³å°‘需è¦ä¸€æ¬¡å®‰å…¨åŠŸèƒ½é©—è‰ã€‚
窗å£çœ‹é–€ç‹—
Assumption: [SM_WWD_01]
在將窗å£çœ‹é–€ç‹—用作安全功能的應用程åºä¸ï¼Œæ ¹æ“šæ‡‰ç”¨è‡³å°‘在æ¯å€‹é§•é§›å‘¨æœŸé©—è‰ä¸€æ¬¡çª—å£çœ‹é–€ç‹—çš„æ£ç¢ºæ€§
Assumption: [SM_WWD_02]
在將窗å£çœ‹é–€ç‹—用作安全功能的應用程åºä¸ï¼Œå…¶æ£ç¢ºçš„功能包括微處ç†å™¨å¾©ä½ä¿¡è™ŸROT和安全狀態輸出的激活在æ¯å€‹å‘¨æœŸè‡³å°‘é©—è‰ä¸€æ¬¡ã€‚
功能看門狗
Assumption: [SM_FWD_01]
在將功能看門狗用作安全功能的應用ä¸ï¼Œè‡³å°‘è¦é©—è‰å…¶æ£ç¢ºçš„功能,æ¯å€‹é§•é§›å‘¨æœŸä¸€æ¬¡ï¼Œå–決于應用程åºã€‚
Assumption: [SM_FWD_02]
在功能看門狗作為安全功能發布的應用程åºä¸ï¼Œå…¶æ£ç¢ºçš„功能包括微處ç†å™¨å¾©ä½ä¿¡è™ŸROT和安全狀態輸出的激活在æ¯æ¬¡é§•é§›ä¸è‡³å°‘é©—è‰ä¸€æ¬¡ï¼Œå‘¨æœŸå–決于應用程åºã€‚
ERR引腳監控
Assumption: [SM_ERR_01]
在將ERR引腳用作安全功能的應用程åºä¸ï¼Œæ¯æ¬¡è‡³å°‘é©—è‰ä¸€æ¬¡å…¶æ£ç¢ºåŠŸèƒ½ï¼Œé©…動周期å–決于應用。
Assumption: [SM_ERR_02]
在ERR引腳用作安全功能的應用ä¸ï¼Œå…¶æ£ç¢ºçš„功能包括微處ç†å™¨å¾©ä½ä¿¡è™ŸROT和安全狀態輸出的激活在æ¯å€‹é§•é§›å‘¨æœŸè‡³å°‘é©—è‰ä¸€æ¬¡ã€‚
請注æ„,測試程åºçš„å¯ç”¨æ€§å–決于錯誤引腳監控的é…置應用:ç«‹å³è¡Œå‹•èˆ‡æ¢å¾©å»¶é²
監控組件
Assumption: [SM_MON_01]
在監控塊用作安全功能的應用程åºä¸ï¼Œç›£è¦–器的æ£ç¢ºåŠŸèƒ½ï¼Œæ¯å€‹ä½¿ç”¨çš„監視器æ¯å€‹é©…動周期至少驗è‰ä¸€æ¬¡å°ä¸æ–·ä¿¡è™Ÿçš„監控。
Assumption: [SM_MON_02]
在監控塊用作安全功能的應用程åºä¸ï¼Œç›£è¦–器的æ£ç¢ºåŠŸèƒ½åœ¨å°æ¯å€‹å·²ä½¿ç”¨çš„監視器至少進行一次驗è‰ï¼Œä»¥æ¿€æ´»å®‰å…¨ç‹€æ…‹è¼¸å‡ºå‘¨æœŸå–決于應用程åºã€‚
ABIST
ABIST的檢測由MCU發起請求
詳細執行è¦å‰‡å¯ä»¥åƒè€ƒSM手冊è¦æ±‚,這里ä¸åœ¨è´…述。
監控功能æ¢å¾©
如果å°è¨å‚™çš„監ç£åŠŸèƒ½çš„測試導致異常或失敗,則相應的監ç£åŠŸèƒ½æ‡‰è¢«èªç‚ºæ˜¯éžæ´»æ€§çš„,并應考慮相應的系統å應以確ä¿å®‰å…¨æ“作。由于缺ä¹ç›£ç£åŠŸèƒ½å¹¶ä¸ä¸€å®šæ„味著é•å了安全目標,微控制器å¯ä»¥æŽ§åˆ¶å ´æ™¯ï¼Œä»¥å¢žåŠ 系統的å¯ç”¨æ€§ã€‚進一æ¥è¬›ç³»çµ±é›†æˆè€…å¯ä»¥é 見æ¢å¾©æ©Ÿåˆ¶ï¼Œä½¿ç›£ç®¡æ¢å¾©æœ‰æ•ˆé‹ä½œã€‚,如å¯ä»¥é‡æ–°é…置有å•é¡Œçš„é…置,或者é‡å•ŸTLF35584.
硬件需求
二次關斷路徑
Assumption: [SM_SS_03]
在應用ä¸è¦ç¢ºä¿SS1å’ŒSS2的高電平輸出被èªç‚ºæ˜¯ä½¿äºŒæ¬¡å®‰å…¨é—œæ–·è·¯å¾‘無效,低電平或者高阻態被èªç‚ºæ˜¯æ¿€æ´»å®‰å…¨é—œæ–·è·¯å¾‘的信號。
Assumption: [SM_SS_04]
SS1å’ŒSS2之間的延é²ä¸èƒ½è¢«è¦–為安全特性
最大é¡å®šå€¼
Assumption: [SM_ABS_01]
在任何æ“作下都ä¸èƒ½é•å數據手冊ä¸é›»æ°£åƒæ•¸çš„最大é¡å®šå€¼
電壓電æµ
溫度
外部器件的é¸æ“‡
å相ä¿è·
å› ç‚ºTLF35584本身ä¸èƒ½å¤ 處ç†å相供電的情æ³ï¼Œæ‰€ä»¥éœ€è¦å¤–部系統層的é¡å¤–電路來處ç†é›»æ± 電壓的å接情æ³ã€‚
輸入濾波
為了使TLF35584都在é¡å®šé›»æ°£åƒæ•¸èŒƒåœå…§æ“作,強烈建è°æ·»åŠ 輸入濾波器,以é™åˆ¶é›»æºç·šä¸Šçš„尖峰,相關的åƒæ•¸å¯ä»¥å¾žTLF35584çš„EMCæ¸¬è©¦å ±å‘Šä¸ç²å–。
éŽæµé™åˆ¶
強烈建è°åœ¨ç®¡è…³æ·»åŠ é™æµé›»é˜»ï¼Œé˜²æ¢å¼•è…³çš„é›»æµè¶…éŽæ‰‹å†Šçš„é™åˆ¶å€¼ã€‚輸入電壓VSTçš„é™åˆ¶ä¸»è¦é å‰ç´šé™å£“器件來æä¾›å¯é 輸入。如我們的應用ä¸çš„LM5085.
主è¦åˆ†ç‚ºå…©é¡ž
ä¸€é¡žæ˜¯é€£æŽ¥åˆ°é›»æ± é›»å£“ç‰ç´šçš„ENAå’ŒWAKè…³å¿…é ˆå°å¿ƒè™•ç†éŽæµå’Œå相,至少大于10K的串è¯é›»é˜»
第二類是åƒSPI(SCS,SCL,SDI,SDO),INT,ROT,WDI,SYN,EVC 至少串è¯ä¸€å€‹å¤§äºŽ50æ姆的電阻,電阻布局的ä½ç½®ä¹Ÿéœ€åœ¨ç³»çµ±ç´šè€ƒæ…®ã€‚
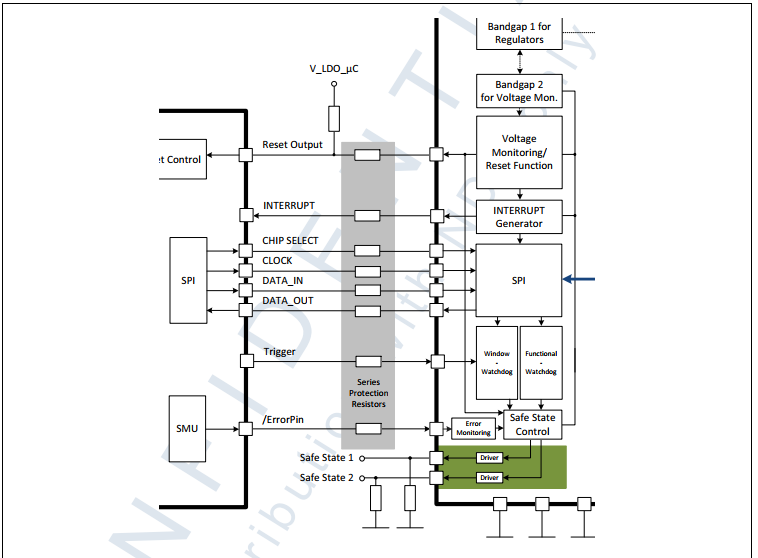
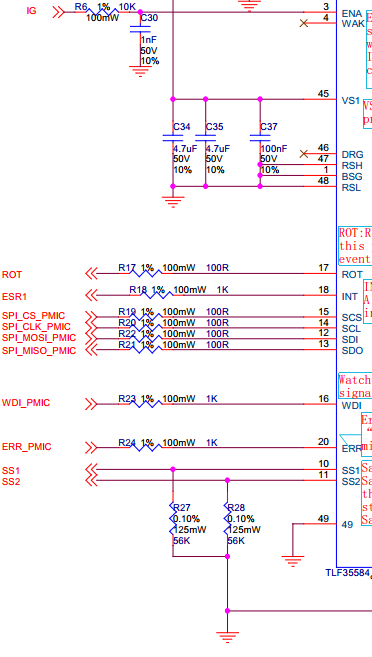
ERRè…³ä¿è·
在MCUçš„SMU故障輸出腳P33.8å’ŒTLF35584çš„ERR腳之間串è¯å¤§äºŽ1K的電阻。

電壓域的分離
強烈建è°å°‡ECU內的高ã€ä½Žå£“å€åˆ†é–‹ï¼Œåœ¨ä¸åŒçµ„的信號之間的電路以減少çŸè·¯çš„風險。這å¯ä»¥é€šéŽåœ¨PCB布線ä¸ä½¿ç”¨è¶³å¤ 的間隙來完æˆä»»ä½•å¤–部高壓和內部低壓信號之間。在這種情æ³ä¸‹æ‡‰çµ¦äºˆç‰¹åˆ¥è€ƒæ…®ä¸åŒåŸŸçš„信號在引腳上連接。
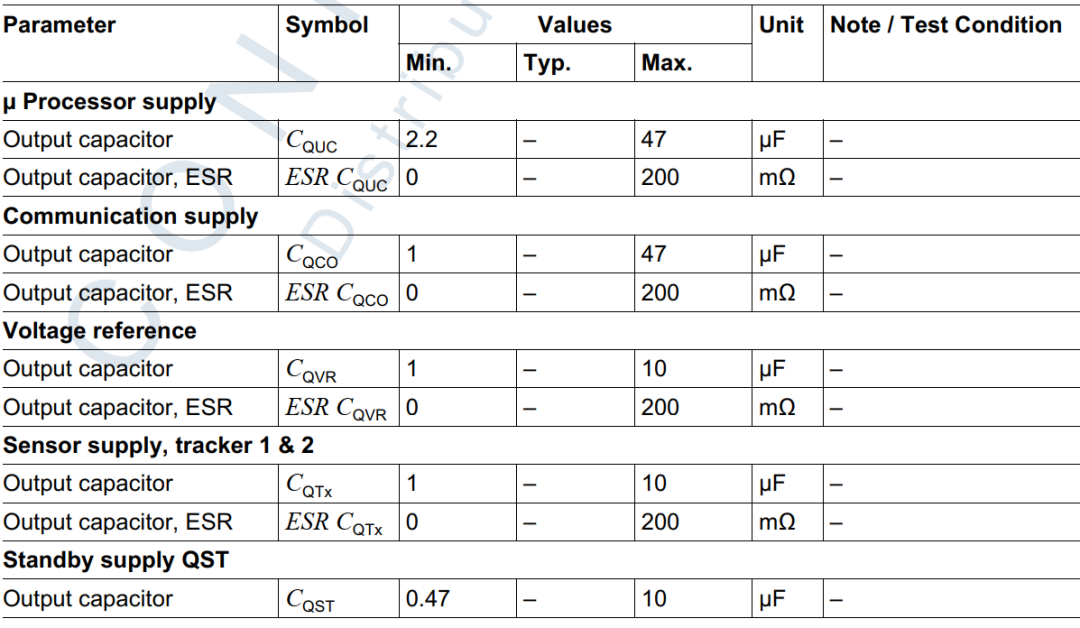
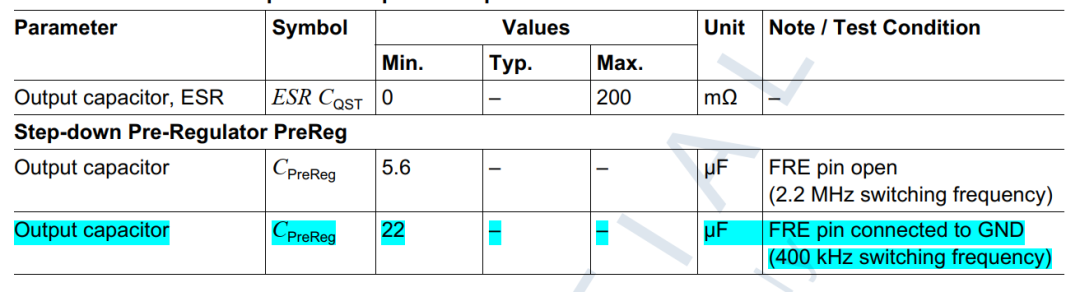
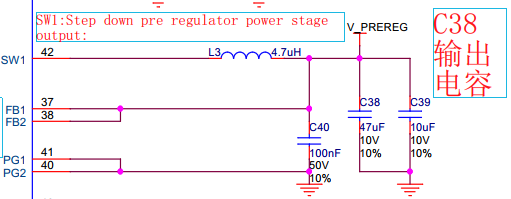
外部被動元器件
å¿…é ˆå¼·åˆ¶ç¢ºä¿é€£æŽ¥åˆ°TLF35584的外部器件在數據手冊è¦æ±‚的范åœå…§ï¼Œå¦‚輸出電感,電容ç‰ã€‚å¤–éƒ¨å™¨ä»¶çµ„ä»¶çš„å¤±æ•ˆå¿…é ˆåœ¨ç³»çµ±å±¤ç´šè¦†è“‹ï¼Œå¯ä»¥ä½¿ç”¨å†—余外部器件,æ高系統層級的å¯é 性。å¯ä»¥åƒè€ƒæ•¸æ“šæ‰‹å†Šæœ‰é—œå¤–部器件è¦æ±‚更詳細的信æ¯ï¼Œé€™é‡Œåªçµ¦å‡ºç°¡å–®çš„è¦æ±‚
總çµï¼š
è¦æ ¹æ“šè‡ªå·±çš„應用é¸æ“‡å…§å¤–安全機制去執行,æ高系統的安全。
上一篇:采煤機用牽引干å¼è®Šå£“器優化...
下一篇:機器人底座的作用åŠç¨®é¡žæœ‰å“ªäº›ï¼Ÿ
ä¸åœ‹å‚³å‹•ç¶²ç‰ˆæ¬Šèˆ‡å…責è²æ˜Žï¼šå‡¡æœ¬ç¶²æ³¨æ˜Ž[來æºï¼šä¸åœ‹å‚³å‹•ç¶²]的所有文å—ã€åœ–片ã€éŸ³è¦–å’Œè¦–é »æ–‡ä»¶ï¼Œç‰ˆæ¬Šå‡ç‚ºä¸åœ‹å‚³å‹•ç¶²(www.siyutn.com)ç¨å®¶æ‰€æœ‰ã€‚如需轉載請與0755-82949061è¯ç³»ã€‚任何媒體ã€ç¶²ç«™æˆ–å€‹äººè½‰è¼‰ä½¿ç”¨æ™‚é ˆæ³¨æ˜Žä¾†æºâ€œä¸åœ‹å‚³å‹•ç¶²â€ï¼Œé•å者本網將追究其法律責任。
本網轉載并注明其他來æºçš„稿件,å‡ä¾†è‡ªäº’è¯ç¶²æˆ–æ¥å…§æŠ•ç¨¿äººå£«ï¼Œç‰ˆæ¬Šå±¬äºŽåŽŸç‰ˆæ¬Šäººã€‚轉載請ä¿ç•™ç¨¿ä»¶ä¾†æºåŠä½œè€…,ç¦æ¢æ“…自篡改,é•è€…è‡ªè² ç‰ˆæ¬Šæ³•å¾‹è²¬ä»»ã€‚
相關資訊
網站簡介|會員æœå‹™|è¯ç³»æ–¹å¼|幫助信æ¯|版權信æ¯|網站地圖|å‹æƒ…éˆæŽ¥|法律支æŒ|æ„見å饋|sitemap
傳動網-å·¥æ¥è‡ªå‹•åŒ–èˆ‡æ™ºèƒ½åˆ¶é€ çš„å…¨åª’é«”â€œäº’è¯ç¶²+â€å‰µæ–°æœå‹™å¹³è‡º
 網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大å”廣告有é™å…¬å¸ 版權所有
ç²µICPå‚™ 14004826號 | 營æ¥åŸ·ç…§è‰æ›¸ | ä¸è‰¯ä¿¡æ¯èˆ‰å ±ä¸å¿ƒ |  粵公網安備 44030402000946號
粵公網安備 44030402000946號















