一ã€ç³»çµ±(tÇ’ng)概述
電梯行æ¥(yè)是一個(gè)特種行æ¥(yè),國家å°é›»æ¢¯çš„è¨(shè)計(jì)ã€åˆ¶é€ ã€å®‰è£ä»¥åŠä½¿ç”¨éƒ½æœ‰è©³ç´°(xì)的國家標(biÄo)準(zhÇ”n)。電梯的主è¦éƒ¨åˆ†æœ‰åœŸå»ºã€æ©Ÿ(jÄ«)械和電氣ç‰çµ„æˆï¼Œæ©Ÿ(jÄ«)械部分有導(dÇŽo)軌ã€è½Žå»‚ã€å°é‡ã€é‹¼çµ²ç¹©ä»¥åŠå…¶ä»–æ©Ÿ(jÄ«)械部分。電氣部分有主控制æ¿ï¼Œè®Šé »å™¨ã€æ›³å¼•æ©Ÿ(jÄ«)ç‰éƒ¨åˆ†æ§‹(gòu)æˆã€‚電梯的é‹(yùn)行在主控制æ¿çš„æŒ‡ä»¤æŽ§åˆ¶è®Šé »å™¨ï¼Œæœ‰è®Šé »å™¨é©…(qÅ«)å‹•(dòng)曳引機(jÄ«)帶動(dòng)轎廂é‹(yùn)è¡Œã€‚è®Šé »å™¨ä½œç‚ºé›»æ¢¯ä¸ç³»çµ±(tÇ’ng)çš„æ ¸å¿ƒéƒ¨ä»¶ï¼Œå°é›»æ¢¯çš„安全å¯é çš„é‹(yùn)行是éžå¸¸é‡è¦çš„。åŒæ™‚(shÃ)系統(tÇ’ng)也å°è®Šé »å™¨æœ‰ä¸€äº›ç‰¹æ®Šçš„è¦æ±‚。許多公å¸é‡å°é›»æ¢¯çš„特殊è¦æ±‚ï¼ŒæŽ¨å‡ºäº†é›»æ¢¯å°ˆç”¨è®Šé »å™¨ä¾†æ»¿è¶³é›»æ¢¯çš„ç‰¹æ®Šè¦æ±‚。而西門åçš„é€šç”¨å¤šåŠŸèƒ½è®Šé »å™¨MM440采用具有ç¾(xià n)代先進(jìn)技術(shù)水平的絕緣柵雙極型晶體管(IGBT)作為功率輸出器件,具有很高的é‹(yùn)è¡Œå¯é æ€§å’ŒåŠŸèƒ½çš„å¤šæ¨£æ€§ï¼Œé‡‡ç”¨è„ˆæ²–é »çŽ‡å¯é¸çš„專用脈寬調(dià o)制技術(shù),å¯ä½¿æ›³å¼•æ©Ÿ(jÄ«)在低噪è²ä¸‹é‹(yùn)行,系統(tÇ’ng)æ›´åŠ å¹³ç©©(wÄ›n)。全é¢è€Œå®Œå–„çš„ä¿è·(hù)功能為系統(tÇ’ng)æ供了å¯é 而良好的ä¿è·(hù)性能,高性能的矢é‡æŽ§åˆ¶æŠ€è¡“(shù),有多種控制方å¼éˆæ´»é¸ç”¨ï¼Œé©ç”¨ä¸åŒçš„é ˜(lÇng)域。在電梯控制系統(tÇ’ng)ä¸ï¼Œé‡‡ç”¨çš„是閉環(huán)矢é‡æŽ§åˆ¶ã€‚具有快速的動(dòng)æ…‹(tà i)響應(yÄ«ng)特性和超強(qiáng)çš„éŽè¼‰èƒ½åŠ›ã€‚眾多的自由功能模塊通éŽBICO(二進(jìn)制互è¯(lián)連接)組æˆäº†å¤§é‡è³‡æºä¾›ç”¨æˆ¶ä½¿ç”¨ï¼Œå¾žè€Œå®Œæˆå¾©(fù)雜的多種控制。æ£æ˜¯MM440å¼·(qiáng)大而éˆæ´»çš„功能å¯ä»¥å‹ä»»é›»æ¢¯æŽ§åˆ¶ç³»çµ±(tÇ’ng)çš„è¦æ±‚。通éŽMM440é©…(qÅ«)å‹•(dòng)ç•°æ¥æ›³å¼•æ©Ÿ(jÄ«)構(gòu)æˆçš„電梯系統(tÇ’ng)完全滿足國標(biÄo)GB7588-2003ã€Šé›»æ¢¯åˆ¶é€ èˆ‡å®‰è£è¦(guÄ«)范》,GB/T10058-1997《電梯技術(shù)æ¢ä»¶ã€‹çš„è¦æ±‚。
二ã€ç³»çµ±(tÇ’ng)的組æˆå’ŒåŸºæœ¬åŽŸç†
電梯是一個(gè)復(fù)雜的系統(tÇ’ng),本文就é‡å°ç”±MM440和曳引機(jÄ«)主控æ¿çµ„æˆçš„電氣控制系統(tÇ’ng)進(jìn)行介紹。如圖1所示。
é›»æºç¶“(jÄ«ng)空氣開關(guÄn)Q接電æºæŽ¥è§¸å™¨KMC之åŽé€£æŽ¥åˆ°è®Šé »å™¨çš„進(jìn)線端RSTï¼Œè®Šé »å™¨å‡ºç·šç«¯UVW經(jÄ«ng)接觸器KMY連接到曳引機(jÄ«)構(gòu)æˆäº†ç³»çµ±(tÇ’ng)的主供電回路。在上電åŽä¸»æŽ§åˆ¶æ¿é–‰åˆKMCä¸€ç›´å¸¶é›»ï¼Œç‚ºè®Šé »å™¨è‡ªèº«æ供電æºå’Œç³»çµ±(tÇ’ng)å‹•(dòng)åŠ›ã€‚å¹¶ä¸”ä½¿è®Šé »å™¨åˆå§‹åŒ–,并把åˆå§‹åŒ–çš„çµ(jié)果通éŽGZ節(jié)點(diÇŽn)輸出給主控制æ¿ï¼Œè€Œé‹(yùn)行接觸器KMY平時(shÃ)是斷開的,在電梯需è¦å•Ÿå‹•(dòng)時(shÃ)在啟動(dòng)KMY使曳引機(jÄ«)帶電。
在曳引機(jÄ«)çš„é©…(qÅ«)å‹•(dòng)軸上安è£æœ‰æ—‹è½‰(zhuÇŽn)編碼器,經(jÄ«ng)éŽå±è”½ç·šæŽ¥åˆ°è®Šé »å™¨çš„信號(hà o)輸入端PGPã€PGMã€PFAã€PFB構(gòu)æˆé–‰ç’°(huán)控制,åŒæ™‚(shÃ)也把輸出信號(hà o)也經(jÄ«ng)éŽå±è”½ç·šæŽ¥åˆ°ä¸»æŽ§åˆ¶æ¿APCR的型號(hà o)輸入端,以便主控制æ¿æŽ§åˆ¶é›»æ¢¯çš„æ£å¸¸é‹(yùn)行。

圖1:電氣系統(tÇ’ng)原ç†åœ–。
MM440è®Šé »å™¨é‡‡ç”¨å¤šæ®µé€ŸæŽ§åˆ¶æ–¹å¼ï¼Œä¸»æŽ§åˆ¶æ¿APCRæ ¹æ“š(jù)å…§(nèi)é¸ä»¥åŠå¤–呼ç‰å‘½ä»¤ï¼Œè¨ˆ(jì)算出è¦åŽ»çš„目的樓層,æ¤æ™‚(shÃ)首先閉åˆKMYï¼Œæ ¹æ“š(jù)上行或者下行命令接通FWD或者REVï¼Œä½¿è®Šé »å™¨å»ºç«‹å‹µ(lì)ç£ï¼Œè¼¸å‡ºè½‰(zhuÇŽn)çŸ©ã€‚è®Šé »å™¨è¼¸å‡ºé‹(yùn)行信號(hà o)RUN,之åŽç¶“(jÄ«ng)éŽä¸€å®šçš„時(shÃ)間打開抱閘YB。å†æ ¹æ“š(jù)å•Ÿå‹•(dòng)è¨(shè)ç½®ä¸åŒçš„段速輸出到多段速端åSS1ã€SS2ã€SS3ã€‚è®Šé »å™¨å°±æœƒ(huì)按照é (yù)å…ˆè¨(shè)定的速度曲線控制曳引機(jÄ«)é‹(yùn)行。
åœæ¢æ™‚(shÃ)主控制æ¿APCR首先在é (yù)定的減速è·é›¢æŠŠé‹(yùn)è¡Œå¤šæ®µé€Ÿæ”¹ç‚ºçˆ¬è¡Œé€Ÿåº¦è¼¸å‡ºçµ¦è®Šé »å™¨æ•¸(shù)å—輸入端åSS1ã€SS2ã€SS3ï¼Œè®Šé »å™¨å°±æœƒ(huì)按è¨(shè)定的速度曲線控制曳引機(jÄ«)到爬行速度,到將è¦å¹³å±¤æ™‚(shÃ)首先去掉多段速信號(hà o),然åŽä¸‹é–˜ï¼Œæœ€åŽåŽ»æŽ‰æ–¹å‘信號(hà o),完æˆä¸€æ¬¡å•ŸåœéŽç¨‹ã€‚下é¢å°±åˆ†æžè®Šé »å™¨æ˜¯å¦‚ä½•æ ¹æ“š(jù)APCR的命令完æˆé›»æ¢¯çš„控制的。
三ã€MM440è®Šé »å™¨çš„è¨(shè)置和應(yÄ«ng)用
æ ¹æ“š(jù)電梯的速度ã€æ›³å¼•æ¯”以åŠé›»æ¢¯çš„載é‡ä¾†ç¢ºå®šæ›³å¼•æ©Ÿ(jÄ«)的轉(zhuÇŽn)速和功率,當(dÄng)曳引機(jÄ«)的功率和電壓確定之åŽï¼Œè®Šé »å™¨çš„é¸åž‹è¦å’Œæ›³å¼•æ©Ÿ(jÄ«)想匹é…,一般是é¸å–大于曳引機(jÄ«)功率的上一個(gè)檔次的數(shù)æ“š(jù)來é¸æ“‡ã€‚ä¸èƒ½å°ä¹Ÿä¸èƒ½å¤ªå¤§ï¼Œå¤ªå¤§ä¸ä½†é€ æˆæˆæœ¬çš„上å‡ï¼Œè€Œä¸”å°Ž(dÇŽo)致控制精度的é™ä½Žã€‚使整個(gè)系統(tÇ’ng)的性能下é™ã€‚
直接按圖1接好線åŽï¼Œè®Šé »å™¨æ˜¯ä¸èƒ½é‹(yùn)è¡Œçš„ï¼Œå¿…é ˆå°è®Šé »å™¨é€²(jìn)è¡Œæ£ç¢ºçš„è¨(shè)ç½®ã€‚é¦–å…ˆæ˜¯è®Šé »å™¨çš„å¿«é€Ÿèª¿(dià o)è©¦ï¼Œé€™æ˜¯è®Šé »å™¨â€œèƒ½è½‰(zhuÇŽn)起來â€çš„基本æ¥é©Ÿã€‚快速調(dià o)試的目的是完æˆè®Šé »å™¨æœ€åŸºæœ¬çš„è¨(shè)ç½®ï¼Œæ±ºå®šè®Šé »å™¨çš„åŸºæœ¬å·¥ä½œæ–¹å¼çš„é¸æ“‡ï¼Œå°æ›³å¼•æ©Ÿ(jÄ«)çš„åƒæ•¸(shù)進(jìn)行“å¸(xué)ç¿’(xÃ)â€ï¼Œä½¿è®Šé »å™¨å’Œæ›³å¼•æ©Ÿ(jÄ«)匹é…èµ·ä¾†ï¼Œæ›´åŠ ç²¾ç¢ºçš„å®ŒæˆæŽ§åˆ¶æŽ§åˆ¶ä»»å‹™(wù)。在快速調(dià o)試ä¸ï¼Œè¦è¼¸å…¥æ›³å¼•æ©Ÿ(jÄ«)的基本åƒæ•¸(shù),包括電壓ã€
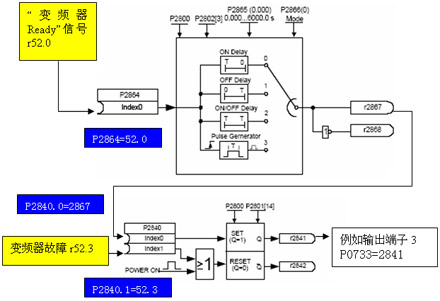
圖2
é›»æµã€åŠŸçŽ‡ã€åŠŸçŽ‡å› 數(shù)ã€é¡å®šé »çŽ‡ç‰åƒæ•¸(shù)ï¼Œæ ¹æ“š(jù)MM440的數(shù)æ“š(jù)手冊è¦æ±‚按曳引機(jÄ«)å牌上的數(shù)æ“š(jù)輸入,其他的幾個(gè)é‡è¦åƒæ•¸(shù)P0300è¦é¸æ“‡ç•°æ¥é›»æ©Ÿ(jÄ«),命令æºP0700é¸ç”¨æ•¸(shù)å—é‡è¼¸å…¥æ–¹å¼ï¼Œé¸æ“‡2,并且在之åŽçš„調(dià o)試ä¸ä½¿P0701~P0708è¨(shè)置為17,å„個(gè)數(shù)å—é‡è¼¸å…¥æŒ‰ç…§è¨(shè)定功能進(jìn)è¡Œåƒæ•¸(shù)化。P1300控制方å¼é¸æ“‡23,帶傳感器的矢é‡è½‰(zhuÇŽn)矩控制,這樣æ‰èƒ½æ»¿è¶³é›»æ¢¯æŽ§åˆ¶çš„è¦æ±‚。按照æ¥é©Ÿæœ€åŽåœ¨P3900ä¸è¼¸å…¥3快速調(dià o)試çµ(jié)æŸå¹¶é€²(jìn)行電動(dòng)æ©Ÿ(jÄ«)的數(shù)æ“š(jù)計(jì)算。
è®Šé »å™¨çš„å¿«é€Ÿèª¿(dià o)試完æˆä¹‹åŽï¼Œé€™åªæ˜¯ç¬¬ä¸€æ¥ï¼Œé‚„ä¸èƒ½æŽ§åˆ¶é›»æ¢¯çš„é‹(yùn)行還è¦é€²(jìn)行多段速的è¨(shè)置,RUN信號(hà o)的輸出è¨(shè)置,以åŠé–‰ç’°(huán)控制的PI制è¨(shè)ç½®ã€S速度曲線的å„個(gè)時(shÃ)é–“çš„è¨(shè)ç½®ç‰ç‰ã€‚
è®Šé »å™¨æ¯æ¬¡ä¸Šé›»åŽè¦é€²(jìn)行本身的åˆå§‹åŒ–工作,由于所é¸ç”¨çš„功能模塊ä¸åŒï¼Œå¾ˆå¯èƒ½åœ¨æ²’有完全åˆå§‹åŒ–完æˆåŽå‰è¼¸å‡ºè®Šé »å™¨æº–(zhÇ”n)備好,å¯ä»¥å·¥ä½œçš„信號(hà o),這時(shÃ)若有呼梯信號(hà o)主æ¿å°±æœƒ(huì)è¼¸å‡ºçµ¦è®Šé »å™¨ä¿¡è™Ÿ(hà o)é©…(qÅ«)å‹•(dòng)電梯é‹(yùn)è¡Œï¼Œé€™å°±é€ æˆç³»çµ±(tÇ’ng)çš„ä¸æ£å¸¸å·¥ä½œï¼Œçµ¦å®‰å…¨é‹(yùn)行帶來å±å®³ã€‚為確ä¿è®Šé »å™¨å®Œå…¨åˆå§‹åŒ–好,å°ä¿¡è™Ÿ(hà o)經(jÄ«ng)éŽä¸€å€‹(gè)定時(shÃ)器延時(shÃ)輸出,åŒæ™‚(shÃ)主æ¿è¦æ±‚è®Šé »å™¨è¼¸å‡ºçš„ä¿¡è™Ÿ(hà o)為ä¿æŒåž‹çš„,為æ¤åœ¨æŠŠä¿¡è™Ÿ(hà o)經(jÄ«ng)一個(gè)RS觸發(fÄ)器ä¿æŒï¼Œå¦‚圖2所示。æ¤æ™‚(shÃ),真æ£çš„“Readyâ€ä¿¡è™Ÿ(hà o)就是RS-觸發(fÄ)器的輸出r2841了,將r2841連接到輸出端å上å³å¯ï¼ˆä¾‹å¦‚,P0733=2841)。
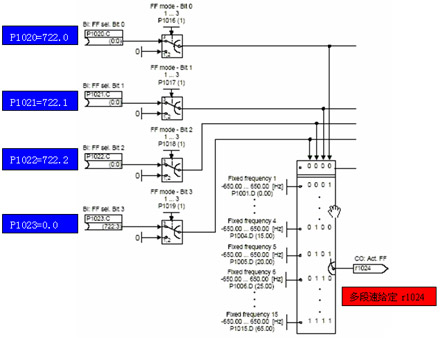
圖3:多段速輸出é¸å®šã€‚
多段速的é¸æ“‡èˆ‡å¯¦(shÃ)ç¾(xià n)是利用åƒæ•¸(shù)P0722.0~P0722.7å˜æ”¾äº†æ•¸(shù)å—輸入1~7的狀態(tà i),如圖3所示當(dÄng)把P701~P703è¨(shè)置為17åŽï¼Œè®Šé »å™¨æœƒ(huì)自動(dòng)把圖3種的åƒæ•¸(shù)è¨(shè)置為如下的值:P1020=722.0,P1021=722.1,P1022=722.2。當(dÄng)輸入狀態(tà i)變化時(shÃ),會(huì)é¸æ“‡P1001~P10016ä¸çš„速度值防御åƒæ•¸(shù)r1024ä¸ï¼Œå†æŠŠr1024的值連接到主給定通é“上作為多段速的輸出值。
當(dÄng)主控制æ¿é€šéŽç«¯åè¼¸å…¥çµ¦è®Šé »å™¨ï¼Œè®Šé »å™¨å°±æœƒ(huì)按è¨(shè)定的速度控制曳引機(jÄ«)é‹(yùn)行,電梯的一次啟動(dòng)å’Œåœæ¢æ›²ç·šå¦‚圖4所示。在啟動(dòng)éŽç¨‹ä¸ï¼ŒåŠ 速度起始段曲線有P1130ä¾†ç¢ºå®šï¼ŒåŠ é€Ÿåº¦ç›´ç·šæ®µæœ‰åƒæ•¸(shù)P1120ä¾†ç¢ºå®šï¼ŒåŠ é€Ÿåº¦çµ(jié)æŸæ®µæ›²ç·šç”±åƒæ•¸(shù)P1131來確定。之åŽé€²(jìn)入勻速é‹(yùn)行階段。在減速起始段曲線由åƒæ•¸(shù)P1132來確定,減速直線段由åƒæ•¸(shù)P1121確定,減速çµ(jié)æŸæ®µæ›²ç·šç”±åƒæ•¸(shù)1133來確定。上述åƒæ•¸(shù)çš„å–®ä½ç‚ºæ™‚(shÃ)間,è¦æ ¹æ“š(jù)速度時(shÃ)é–“æ›ç®—æˆé€Ÿåº¦å’ŒåŠ é€Ÿå€¼ï¼Œå¹¶æ ¹æ“š(jù)電梯技術(shù)æ¢ä»¶å’Œè¦(guÄ«)范的è¦æ±‚來調(dià o)整,滿足舒é©æ„Ÿå’Œæ•ˆçŽ‡çš„è¦æ±‚。
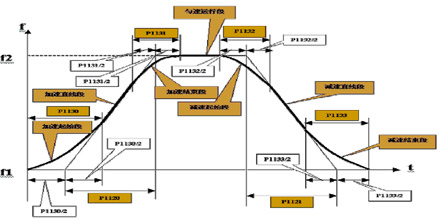
圖4:電梯é‹(yùn)å‹•(dòng)速度曲線。
除了上述åƒæ•¸(shù)外,還有倆個(gè)åƒæ•¸(shù)å°é›»æ¢¯çš„未定é‹(yùn)行和舒é©æ„Ÿéžå¸¸é‡è¦ï¼Œé€Ÿåº¦èª¿(dià o)節(jié)器比例系數(shù)P1460.0,速度調(dià o)節(jié)器ç©åˆ†å¸¸æ•¸(shù)P1462.0,圖5是P1460.0å’Œ1462.0的調(dià o)整情æ³ï¼Œåœ–ä¸A為速度
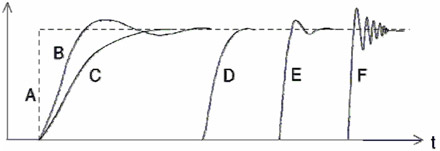
圖5
給定信號(hà o),Bã€Cã€Dã€Eã€F為å饋信號(hà o),B為P1460å’ŒP1462都åå°ï¼ŒC為1460åå°ï¼Œä½†é«˜é€Ÿäº‹éœ‡å‹•(dòng)å°ï¼Œä½Žé€ŸæŽ§åˆ¶æ•ˆæžœæ¯”較差。E輕微超調(dià o),P1460å大,P1462åå°ï¼Œä½Žé€Ÿæ˜¯æŽ§åˆ¶æ•ˆæžœå¥½ï¼Œä½†é«˜é€Ÿæ™‚(shÃ)會(huì)有一些振動(dòng)。F為嚴(yán)é‡è¶…調(dià o)P1460太大,P1462åå°ã€‚D的效果最好,調(dià o)整時(shÃ)先進(jìn)å¯èƒ½çš„åŠ å¤§P1460,到ä¸ç”¢(chÇŽn)生超調(dià o)為æ¢ï¼Œä¹‹åŽåœ¨ç›¡å¯èƒ½åŠ 大P1462,以ä¸ç”¢(chÇŽn)生振蕩為æ¢ã€‚
å››ã€æ‡‰(yÄ«ng)用å‰æ™¯ä»¥åŠå•é¡Œ
ç›®å‰ï¼Œè¨±ç¹¼é›»æ¢¯å…¬å¸å·²ç¶“(jÄ«ng)有2000臺(tái)電梯應(yÄ«ng)用西門åMM440è®Šé »å™¨åœ¨æŠ•å…¥é‹(yùn)行,é‹(yùn)行穩(wÄ›n)定å¯é ,全部是應(yÄ«ng)用于異æ¥æ›³å¼•æ©Ÿ(jÄ«)的直梯。在åŒæ¥æ›³å¼•æ©Ÿ(jÄ«)和扶梯上還沒有應(yÄ«ng)用,如何挖掘MM440å¼·(qiáng)大的功能,使之應(yÄ«ng)用于åŒæ¥æ›³å¼•æ©Ÿ(jÄ«)和扶梯ç‰æŽ§åˆ¶ç³»çµ±(tÇ’ng)的應(yÄ«ng)用,是下一æ¥ç ”究的課題。


















 網(wÇŽng)站客æœ
網(wÇŽng)站客æœ 粵公網(wÇŽng)安備 44030402000946號(hà o)
粵公網(wǎng)安備 44030402000946號(hà o)