首é |資訊|產å“|ä¼æ¥|å“牌|商機|技術|專題|è¦–é »|展會|媒體|論壇|下載

 您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
應用方案
>
交æµä¼ºæœç³»çµ±åŠåœ¨è‡ªå‹•ä¸Šè“‹æ©Ÿä¸çš„應用
您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
應用方案
>
交æµä¼ºæœç³»çµ±åŠåœ¨è‡ªå‹•ä¸Šè“‹æ©Ÿä¸çš„應用
時間:2018-05-09 10:50:44來æºï¼šç¶²çµ¡è½‰è¼‰
å‰è¨€
è¿‘å¹¾å年來伴隨著微電å技術和計算機技術的飛速進æ¥ï¼Œä½¿ä¼ºæœæŠ€è¡“的發展çªé£›çŒ›é€²ã€‚在機械ã€è¨å‚™ç‰ç›¸é—œé ˜åŸŸå„種é‹å‹•éƒ¨ä»¶çš„速度控制ã€é‹å‹•è»Œè·¡æŽ§åˆ¶éƒ½æ˜¯ä¾é å„種伺æœç³»çµ±ä¾†å®Œæˆçš„ã€‚å› æ¤åœ¨å…¨è‡ªå‹•ä¸Šè“‹æ©Ÿçš„快速æå‡å’Œé«˜é€Ÿæ°´å¹³ç§»å‹•å…©å€‹é‹å‹•è»Œè·¡çš„控制è¨è¨ˆä¸Šå‡é‡‡ç”¨äº†å…ˆé€²çš„數å—交æµä¼ºæœæŽ§åˆ¶ç³»çµ±ï¼Œä¿è‰å¯¦ç¾ç”Ÿç”¢è¦æ±‚的速度和控制精度。
全數å—交æµä¼ºæœæŽ§åˆ¶çš„å«ç¾©
所謂全數å—交æµä¼ºæœç³»çµ±å³ç³»çµ±æ‰€æœ‰çš„控制調節全部采用大è¦æ¨¡æ•¸å—集æˆé›»è·¯ä½œç‚ºç³»çµ±çš„æ ¸å¿ƒæŽ§åˆ¶èŠ¯ç‰‡ï¼Œå¯¦ç¾äº¤æµä¼ºæœç³»çµ±çš„ä½ç½®ã€é€Ÿåº¦å’Œé›»æµç’°çš„全數å—化控制,通éŽæ•¸å—處ç†æŠ€è¡“由軟件控制算法來完æˆï¼Œç›´æŽ¥è¼¸å‡ºè„ˆå¯¬èª¿åˆ¶ä¿¡è™Ÿé©…動功率放大器å°ä¼ºæœé›»æ©Ÿé€²è¡ŒæŽ§åˆ¶ï¼Œå®Œæˆç³»çµ±çš„控制任務。
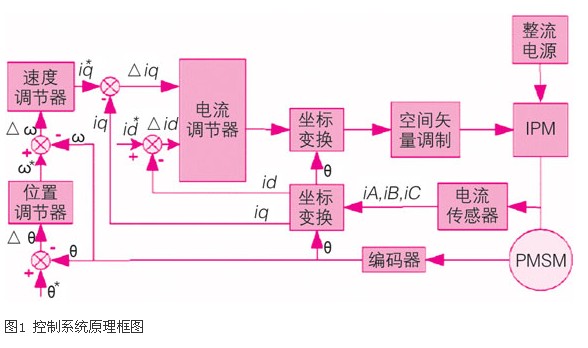
全數å—交æµä¼ºæœç³»çµ±çš„控制機ç†
以交æµæ°¸ç£åŒæ¥é›»æ©Ÿç‚ºæŽ§åˆ¶å°è±¡ï¼ŒæŽ§åˆ¶ç³»çµ±é‡‡ç”¨åŸºäºŽæ•¸å—信號處ç†å™¨ms320f2812(dspï¼‰ç‚ºæ ¸å¿ƒçš„å…¨æ•¸å—伺æœç³»çµ±ç‚ºä¾‹ï¼Œå…¶ä¼ºæœç³»çµ±é‡‡ç”¨ä½ç½®ç’°ã€é€Ÿåº¦ç’°å’Œé›»æµç’°ä¸‰é–‰ç’°æŽ§åˆ¶ã€‚å…¶ä¸ï¼Œä½ç½®ç’°å¯¦ç¾ç²¾ç¢ºçš„ä½ç½®æŽ§åˆ¶ï¼Œé€Ÿåº¦ç’°å¯¦ç¾å¿«é€Ÿè·Ÿè¹¤ï¼Œé›»æµç’°é‡‡ç”¨é›»å£“空間矢é‡è„ˆå¯¬èª¿åˆ¶ï¼ˆsvpwm)控制算法實ç¾å¿«é€Ÿå‹•æ…‹éŸ¿æ‡‰ï¼Œä»¥ç²å¾—優良的控制性能。驅動器控制系統原ç†å¦‚圖1所示。
全數å—交æµä¼ºæœæŽ§åˆ¶ç³»çµ±çš„系統組æˆ
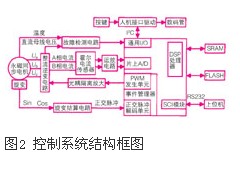
系統硬件主è¦ç”±ä»¥dspç‚ºæ ¸å¿ƒçš„ä¸»æŽ§å–®å…ƒã€åŠŸçŽ‡æ”¾å¤§å’Œä¿è·å–®å…ƒã€é›»æµå饋檢測單元ã€æ—‹è½‰è®Šå£“器解算單元ã€æ•…障檢測單元以åŠäººæ©ŸæŽ¥å£å–®å…ƒç‰éƒ¨åˆ†çµ„æˆã€‚如圖2所示。旋轉變壓器與編碼器的作用相åŒï¼Œéƒ½ç‚ºç³»çµ±çš„å饋è£ç½®ã€‚電機控制專用dsp芯片兼有高é‹ç®—速度和單片機的強控制能力,它的出ç¾ç‚ºé›»æ©ŸæŽ§åˆ¶ç³»çµ±çš„全數å—化æ供了硬件支æŒã€‚dspæ“有兩個專用于電動機控制的事件管ç†å™¨ï¼ˆevaå’Œevb),系統充分利用了事件管ç†å™¨æ供的資æºï¼Œä½¿è¨è¨ˆå¤§ç‚ºç°¡åŒ–。
全自動上蓋機控制系統的概æ³
æ ¹æ“šç¾æœ‰ç”Ÿç”¢çš„è¦æ±‚上蓋機的æ£å¸¸é‹è¡Œé€Ÿåº¦æ‡‰é”到æ¯å°æ™‚600桶以上,最大速度應é”到650桶。
上蓋機的機械形å¼ç‚ºæ—‹è½‰é€£çºŒä¾›è“‹ï¼Œåœ¨å„²å€‰è½‰ç›¤åœæ¢æ™‚,æ“作人員å¯ä»¥æ‰¹é‡çš„為空倉進行上蓋。基本動作框圖如圖3所示。
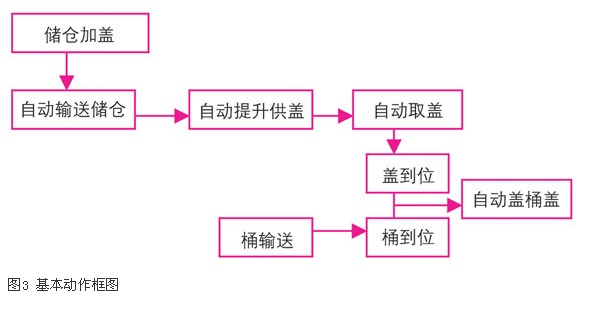
æ ¹æ“šç›®å‰ç”Ÿç”¢ç·šçš„è¦æ±‚和上蓋機的基本動作框圖,å°è‡ªå‹•ä¸Šè“‹æ©Ÿçš„動作進行了é€é …分解,通éŽåˆ†æžç™¼ç¾å…¨éƒ¨åˆ†è§£å‹•ä½œä¸å–è“‹åŽçš„平移動作和蓋æå‡æ©Ÿæ§‹çš„回è½å‹•ä½œå°æ™‚間和精度è¦æ±‚較高,è¦åœ¨é©æ‡‰é »ç¹å•Ÿåœã€é »ç¹æ£å轉切æ›çš„å‰æ下,到é”速度快ã€å®šä½æº–確的è¦æ±‚。å¦å¤–å°å„²å€‰è½‰ç›¤çš„旋轉定ä½çš„精度也è¦æ±‚較高。如果速度和定ä½é”ä¸åˆ°è¦æ±‚,就無法é”到生產效率的è¦æ±‚,影響蓋蓋的質é‡ï¼Œåš´é‡æ™‚é‚„æœƒé€ æˆæ©Ÿæ¢°çš„æ壞和人身傷害。
全自動上蓋機控制系統的é…ç½®
通éŽå°åˆ†è§£å‹•ä½œçš„分æžå’Œå‹•ä½œæ™‚間的計算得出系統動作難點
(1)æå‡æ©Ÿæ§‹ç¸½é«˜åº¦ç‚º0.8米,在上å‡æ™‚,在4.8秒內行走一個蓋的高度31mmå³å¯ï¼›ä½†æå‡æ©Ÿæ§‹ä¸‹é™çš„時間僅為2秒,å³åœ¨2秒內è¦è¡Œèµ°1.2米,速度為æ¯ç§’0.6米,å°é‹è¡Œé€Ÿåº¦è¦æ±‚很高。并且為ä¿è‰å–è“‹çš„å¯é 性,è¦æ±‚æå‡å®šä½æº–確,帶防æ¢æºœè»Šçš„è£ç½®ï¼Œé˜²æ¢å‡ºç¾æ©Ÿæ¢°çµæ§‹çš„æ壞。
(2)水平移動機構長度為1.0米,è¦æ±‚在1.1秒內完æˆæ°´å¹³ç§»å‹•å‹•ä½œï¼ŒåŒ…æ‹¬å…©ç«¯çš„å¹³ç©©åŠ é€Ÿå’Œæ¸›é€Ÿåœè»Šï¼Œå³é€Ÿåº¦æ‡‰åˆ°é”æ¯ç§’0.91米以上。在滿足高速é‹è¡Œçš„å‰æ下還應é”到準確定ä½ï¼Œé‹è¡Œå¹³ç©©çš„è¦æ±‚。
系統è¨å‚™çš„é¸åž‹
實ç¾è¨å‚™æå‡å’Œæ°´å¹³ç§»å‹•å‹•ä½œçš„è¦æ±‚,在電氣控制系統方é¢å¯ä»¥è€ƒæ…®é‡‡ç”¨ä¼ºæœç³»çµ±æŽ§åˆ¶ã€æ¥é€²ç³»çµ±æŽ§åˆ¶ï¼Œé‚„å¯ä»¥ä½¿ç”¨æ°£å‹•ç³»çµ±ã€æ™®é€šé›»æ©Ÿç‰å¾ˆå¤šæ–¹å¼ã€‚通éŽç³»çµ±çµ„æˆã€æŽ§åˆ¶åŽŸç†ã€æ€§èƒ½åŠæˆæœ¬ç‰æ–¹é¢åˆ†æžï¼Œæ ¹æ“šè¨å‚™æ€§èƒ½æ出的è¦æ±‚,考慮到è¨å‚™è¦æ±‚的機械強度ç‰æ–¹é¢çš„內容,在æå‡æ–¹å¼ä¸Šæœ€çµ‚é¸æ“‡äº†é‡‡ç”¨å®‰å·âˆ‘-ⅴ系列全數å—伺æœç³»çµ±æŽ§åˆ¶æ»¾ç çµ²æ 帶動機械托爪的çµæ§‹ã€‚水平行走采用了安å·ä¼ºæœç³»çµ±æŽ§åˆ¶åŒæ¥é½’形帶帶動一個氣動機械手的的方å¼ï¼Œé€™ç¨®çµæ§‹ç°¡å–®ã€è¼•ä¾¿ï¼Œé©äºŽé«˜é€Ÿé‹è¡Œã€‚
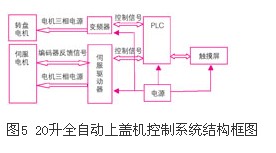
整個全自動上蓋機的控制以西門åå¯ç·¨ç¨‹æŽ§åˆ¶å™¨s7-200ç³»çµ±ç‚ºæ ¸å¿ƒï¼Œå®ƒæ˜¯ä¸€ç¨®å°åž‹åŒ–ã€é«˜é€Ÿåº¦ã€é«˜æ€§èƒ½çš„plc,通éŽplc發出控制脈沖來實ç¾å°ä¼ºæœç³»çµ±çš„控制。æ“作部分由觸摸å±ä¾†å¯¦ç¾ã€‚整體的系統çµæ§‹æ¡†åœ–如圖5所示。
全自動上蓋機伺æœç³»çµ±çš„è¨è¨ˆ
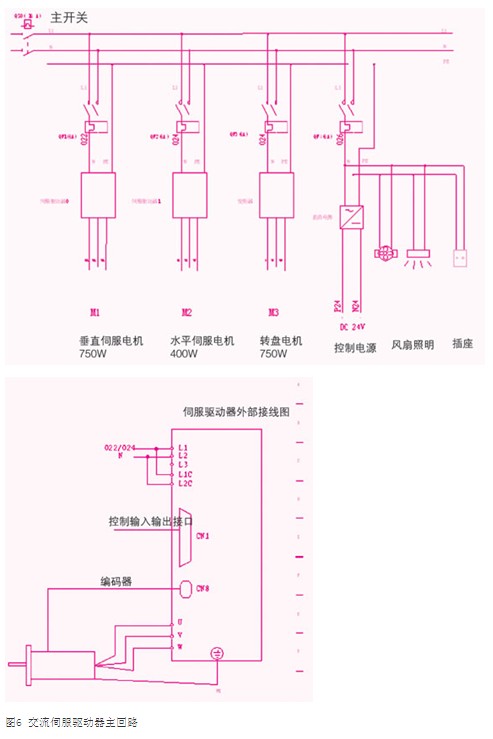
交æµä¼ºæœé©…動器主回路
系統采用三相ac220v伺æœé›»æ©Ÿï¼Œé©…動器的uã€vã€wåŠæŽ¥åœ°ç«¯åˆ†åˆ¥æŽ¥ä¼ºæœé›»æ©Ÿçš„a相ã€b相ã€c相和伺æœé›»æ©Ÿçš„åœ°ç·šã€‚å¿…é ˆæŒ‰æ¬¡åºä¸€ä¸€å°æ‡‰åœ°é€£æŽ¥ï¼Œå¦å‰‡æœ‰å¯èƒ½å°é©…動器或伺æœé›»æ©Ÿé€ æˆæ害。llã€l2ã€æ˜¯ä¼ºæœå–®å…ƒå–®ç›¸ä¸»é›»è·¯è¼¸å…¥ç«¯ï¼Œl1cã€l2c是控制電路電æºè¼¸å…¥ç«¯ã€‚編碼器與驅動器的cn2端å£ç›¸æŽ¥ï¼Œç·¨ç¢¼å™¨çš„cã€dã€hã€g分別為數據傳輸和5vã€0v線,分別與cn2端å£çš„ps(5)ã€ï¼ps(6)ã€5v(1)ã€0v(2)相連。實際接線以é¡è‰²å€åˆ†ï¼Œå¦‚圖6所示。

控制回路的è¨è¨ˆ
(1)伺æœå–®å…ƒçš„cn1接å£åŠå…¶æŽ¥æ³•ï¼šä¼ºæœå–®å…ƒçš„cn1接å£æ˜¯ä¼ºæœè¼¸å…¥è¼¸å‡ºæŽ§åˆ¶ç·šçš„接å£ã€‚作為ä½ç½®æŒ‡ä»¤è¼¸å…¥è¼¸å‡ºæŽ¥å£ï¼Œä½ç½®ç”¨é‡è™Ÿæœ‰ï¼šæŒ‡ä»¤è„ˆæ²–輸入(7,8,11,12),在控制è¦æ±‚ä¸ï¼Œè¦æ±‚伺æœç³»çµ±æº–備好åŽæ–¹å¯å•Ÿå‹•ç¨‹åºï¼Œé€šéŽä¼ºæœon工作信號解除驅動器內部的柵極å°éŽ–,使電機變為通電狀態。為了伺æœç³»çµ±ä¸è¶…程é‹è¡Œï¼Œè¨ç½®å…©å€‹é™ä½é–‹é—œä¾†ç¦æ¢æ£è½‰é©…å‹•å’Œç¦æ¢å轉驅動,åŒæ™‚è¨ç½®å ±è¦åŠŸèƒ½ã€‚圖7為垂直伺æœcn1的接å£é›»è·¯ã€‚
è¯æŽ¥å™¨cn1信號線(50é‡ï¼‰ï¼šä½œç‚ºå¤–部控制信號的輸入\輸出。其注æ„äº‹é …æ˜¯ï¼š
(a)用24vdcçš„é›»æºï¼Œä½œç‚ºæŽ§åˆ¶ä¿¡è™Ÿçš„供電。
(b)伺æœé©…動器與其它è¨å‚™é–“的連線應盡é‡çŸï¼ˆ3米之內)。
(c)控制線與電æºç·šæ‡‰ç›¡é‡éš”開(大于30cm),并且ä¸è¦å°‡å®ƒå€‘æ†åœ¨ä¸€èµ·æˆ–放在åŒä¸€æŽ¥ç·šæ§½å…§ã€‚
(d)å°äºŽcn1信號線應采用雙絞å±è”½ç·šï¼Œå¹¶ä¸”å°‡å±è”½ç·šèˆ‡é©…動器的信號地(gnd)連在一起。
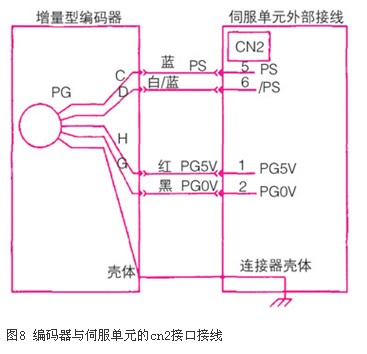
伺æœå–®å…ƒçš„cn2接å£åŠå…¶æŽ¥æ³•ï¼šä¼ºæœå–®å…ƒçš„cn2接å£æ˜¯é€£æŽ¥ç·¨ç¢¼å™¨çš„端å£ã€‚cn2的端å有bat(+)ã€bat(一)作為絕å°å€¼ç·¨ç¢¼å™¨ç”¨é›»æºæŽ¥å£ã€‚cã€dã€hã€g是伺æœé›»æ©Ÿsgmghçš„é‡è™Ÿã€‚編碼器與伺æœå–®å…ƒçš„cn2接å£æŽ¥ç·šåœ–如圖8所示。
(3)增益調整時應注æ„çš„äº‹é …ï¼š
增益的最優值ä¾è² è¼‰è€Œå®šï¼Œè‹¥è² è¼‰è®ŠåŒ–ï¼Œå‰‡éœ€è¦é‡æ–°èª¿æ•´ã€‚
è‹¥ä½ç½®ç’°å¢žç›ŠéŽå¤§ï¼Œæ©Ÿæ¢°å‰›æ€§è¼ƒé«˜ï¼Œæœ‰å¯èƒ½å°Žè‡´æŒ¯è•©ã€‚
è‹¥é‡‡ç”¨é©…å‹•å™¨çš„é€Ÿåº¦ç’°è€Œå¤–åŠ ä½ç½®ç’°å–®å…ƒï¼Œä¼ºæœç³»çµ±çš„ä½ç½®ç’°å¢žç›Šæœƒç”±äºŽé€Ÿåº¦æŒ‡ä»¤è¼¸å…¥å¢žç›Šåƒæ•¸çš„改變而改變。
若增益è¨ç½®å€¼éŽå¤§ï¼Œæœƒå¼•èµ·æŒ¯è•©ï¼Œé€™æ™‚應減å°è¨ç½®å€¼å¾žè€Œåœæ¢æŒ¯è•©ã€‚è‹¥ä¸èƒ½åœæ¢æŒ¯è•©ï¼Œå‰‡é—œæŽ‰é›»æºå’Œä¼ºæœç³»çµ±ä¿¡è™Ÿï¼Œç„¶åŽå†é–‹å•Ÿé›»æºå°‡å¢žç›Šæ¢å¾©åˆ°è¼ƒå°çš„值。
çµæŸèªž
ç›®å‰æˆ‘å€‘ç ”åˆ¶çš„å…¨è‡ªå‹•ä¸Šè“‹æ©Ÿå·²ç¶“åœ¨ç”Ÿç”¢ç·šä¸Šæ£å¼é‹è¡Œï¼ŒæŽ§åˆ¶ç³»çµ±çš„é‹è¡Œæ•ˆæžœéžå¸¸ä»¤äººæ»¿æ„,æ¯å°æ™‚上蓋平å‡é”到了620桶左å³ï¼Œä¸Šè“‹è³ªé‡åˆæ ¼çŽ‡åœ¨97%以上,完全é”到了è¨è¨ˆçš„目標。
é”到目標的關éµåœ¨äºŽåœ¨è¨å‚™ä¸»è¦çš„æå‡å’Œæ°´å¹³é‹å‹•éƒ¨åˆ†é‡‡ç”¨äº†æ•¸å—交æµä¼ºæœæŽ§åˆ¶ç³»çµ±ä½œç‚ºé©…動執行機構,代替了以普通三相電機為動力的系統,充分發æ®äº†æ•¸å—交æµä¼ºæœæŽ§åˆ¶ç³»çµ±çš„高速ã€å¤§æ‰çŸ©ã€æŽ§åˆ¶ç²¾åº¦é«˜ã€æŠ—éŽè¼‰èƒ½åŠ›å¼·ã€ç¯€èƒ½ç‰å„ªå‹¢ã€‚
è¯æŽ¥å™¨cn2信號線(6é‡ï¼‰ï¼šä½œç‚ºä¼ºæœé›»æ©Ÿç·¨ç¢¼å™¨çš„連接線。其注æ„äº‹é …æ˜¯ï¼š
å°‡å±è”½ç·šåŒå¤–殼相連,將電機å±è”½ç·šåŒé©…動器å±è”½ç·šç›¸é€£æŽ¥ã€‚
電纜線最長的長度為105,若太長,驅動器內ä¿è‰ç·¨ç¢¼å™¨æ£å¸¸å·¥ä½œçš„輸出電壓(5v)會有æ失,編碼器將ä¸èƒ½æ£å¸¸å·¥ä½œã€‚
åŒé›»æºç·šï¼ˆr\s\t)相隔è·é›¢æ‡‰ç›¡é‡é (大于30cm),并且é¿å…æ†åœ¨ä¸€èµ·æˆ–接在åŒä¸€æŽ¥ç·šæ§½å…§ã€‚
(2)交æµä¼ºæœé©…動器用戶åƒæ•¸è¨ç½®
安å·âˆ‘-ⅴ系列全數å—å¼äº¤æµä¼ºæœé©…動器sgdv有一系列的åƒæ•¸ï¼Œé€šéŽé€™äº›åƒæ•¸çš„è¨ç½®å’Œèª¿æ•´ï¼Œç”¨æˆ¶å¯ä»¥æ”¹è®Šç³»çµ±çš„性能和功能。調試å‰æ‡‰é¦–å…ˆè¨ç½®çš„åƒæ•¸æœ‰ï¼š
åƒæ•¸pn000:è¨ç½®é©…動器控制方å¼ç‚º0010——ä½ç½®æŽ§åˆ¶æ–¹å¼ï¼ˆè„ˆæ²–åºåˆ—指令);
ä½ç½®æŽ§åˆ¶åƒæ•¸è¨å®šï¼špgåé¥‹è„ˆæ²–çš„åˆ†é »æ¯”â€”â€”é›»å齒輪{a/b}çš„è¨å®šã€‚
“電å齒數â€æ˜¯å°ä¾†è‡ªä¸Šä½è£ç½®è¼¸å…¥æŒ‡ä»¤çš„1個脈沖å°æ‡‰äºŽå·¥ä»¶æ‰€èµ°çš„移動é‡é€²è¡Œä»»æ„è¨å®šçš„功能。
é›»å齒數比b/a=pn20e/pn210=(編碼器分辨率/è² è¼‰è»¸æ—‹è½‰1周的移動é‡ï¼‰*(m/n)=32768/6000。å³åƒæ•¸pn20eè¨ç‚º32768,pn210è¨ç‚º6000。
在生產線上安è£èª¿è©¦æ™‚,伺æœé›»æ©Ÿåœ¨åœæ¢æˆ–é‹è¡Œç‹€æ…‹ä¸æœƒç™¼ç”ŸæŒ¯è•©å’Œå™ªè²ï¼Œå³ä¸èƒ½åœ¨è² 載æ¢ä»¶ä¸‹ç²å¾—最åˆé©çš„響應和穩定性,æ¤æ™‚需è¦é€²è¡ŒåŸºæœ¬å¢žç›Šèª¿æ•´ã€‚在ä½ç½®æŽ§åˆ¶æ–¹å¼æ™‚,在工作ç¾å ´é€²è¡ŒåŸºæœ¬å¢žç›Šèª¿æ•´çš„用戶åƒæ•¸æœ‰ï¼š
è¨ç½®é€Ÿåº¦ç’°ç©åˆ†æ™‚間常數åƒæ•¸pn101較å°å€¼ï¼Œå…¶å€¼è¶Šå°ï¼Œä½ç½®å差值相減越快;
è¨ç½®ä½ç½®ç’°å¢žç›Šåƒæ•¸pn102較大而ä¸ç™¼ç”ŸæŒ¯è•©ç‚ºæ¢ï¼›
è¨ç½®åƒæ•¸pn109,將速度å‰é¥‹ç³»æ•¸è¨ç½®ç‚ºæœ€å°ï¼ˆ0%)
標簽:
![]()
上一篇:工æ¥è‡ªå‹•åŒ–的典型應用PLC的發...
下一篇:三è±ä¼ºæœç³»çµ±åœ¨LED分光分色工...
ä¸åœ‹å‚³å‹•ç¶²ç‰ˆæ¬Šèˆ‡å…責è²æ˜Žï¼šå‡¡æœ¬ç¶²æ³¨æ˜Ž[來æºï¼šä¸åœ‹å‚³å‹•ç¶²]的所有文å—ã€åœ–片ã€éŸ³è¦–å’Œè¦–é »æ–‡ä»¶ï¼Œç‰ˆæ¬Šå‡ç‚ºä¸åœ‹å‚³å‹•ç¶²(www.siyutn.com)ç¨å®¶æ‰€æœ‰ã€‚如需轉載請與0755-82949061è¯ç³»ã€‚任何媒體ã€ç¶²ç«™æˆ–å€‹äººè½‰è¼‰ä½¿ç”¨æ™‚é ˆæ³¨æ˜Žä¾†æºâ€œä¸åœ‹å‚³å‹•ç¶²â€ï¼Œé•å者本網將追究其法律責任。
本網轉載并注明其他來æºçš„稿件,å‡ä¾†è‡ªäº’è¯ç¶²æˆ–æ¥å…§æŠ•ç¨¿äººå£«ï¼Œç‰ˆæ¬Šå±¬äºŽåŽŸç‰ˆæ¬Šäººã€‚轉載請ä¿ç•™ç¨¿ä»¶ä¾†æºåŠä½œè€…,ç¦æ¢æ“…自篡改,é•è€…è‡ªè² ç‰ˆæ¬Šæ³•å¾‹è²¬ä»»ã€‚
相關資訊
網站簡介|會員æœå‹™|è¯ç³»æ–¹å¼|幫助信æ¯|版權信æ¯|網站地圖|å‹æƒ…éˆæŽ¥|法律支æŒ|æ„見å饋|sitemap
傳動網-å·¥æ¥è‡ªå‹•åŒ–èˆ‡æ™ºèƒ½åˆ¶é€ çš„å…¨åª’é«”â€œäº’è¯ç¶²+â€å‰µæ–°æœå‹™å¹³è‡º
 網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大å”廣告有é™å…¬å¸ 版權所有
ç²µICPå‚™ 14004826號 | 營æ¥åŸ·ç…§è‰æ›¸ | ä¸è‰¯ä¿¡æ¯èˆ‰å ±ä¸å¿ƒ |  粵公網安備 44030402000946號
粵公網安備 44030402000946號















