時間:2023-07-10 10:41:37來源:可可電驅
下面將從以下幾點來介紹高壓電驅系統安全保護策略:
什么是ASC;
ASC狀態下電流隨轉速的變化趨勢;
ASC狀態下電機制動力矩隨轉速的變化趨勢;
什么是****OC;
什么是0-torque控制;
安全保護策略: OC、ASC、0-torque的選擇機制
1. 主動短路工作狀態:ASC
主動短路又叫ASC(active shortcircuit),以電驅系統搭載三相IGBT功率模塊為例,通過關斷IGBT的上橋臂三個管,同時開通下橋臂三個管,如圖1所示;或者開通IGBT的上橋臂三個管,同時關斷下橋臂三個管,即為主動短路保護安全工作狀態。
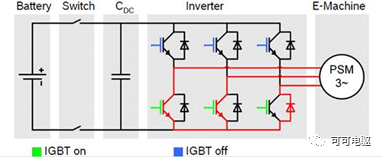
圖1.下橋臂主動短路時IGBT的工作狀態
主動短路工作狀態時,電機定子繞組與下橋臂的IGBT形成閉環回路,電機產生的反電動勢能量通過定子繞組釋放出來,電機輸出端產生相應的制動力矩。以峰值為150kw的永磁同步電機為例,仿真ASC工作狀態下電流和電機制動力矩隨轉速的變化情況。
永磁同步電機的磁鏈方程如下:
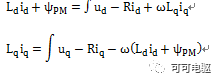
當進入ASC工作狀態時,電機輸入d軸和q軸電壓為0.當達到穩態時,則得:
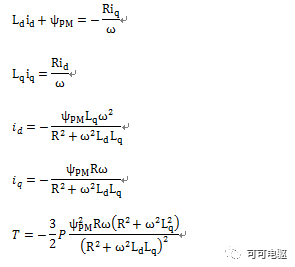
ASC工作狀態時,不同轉速下,穩態Id電流隨著轉速升高而急速升高,到達一定轉速后,電流基本不變,就等于特征電流,如圖2所示,僅供參考。具體值與電機的設計參數:磁鏈、電感、極對數、繞組電阻等相關。
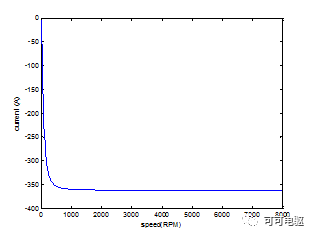
圖2. ASC狀態下Id電流仿真曲線
ASC工作狀態時,不同轉速下,穩態Id電流隨在低速區隨著轉速升高而急速增大,后隨著轉速升高而急速減小,高速區趨于穩定,如圖3所示。
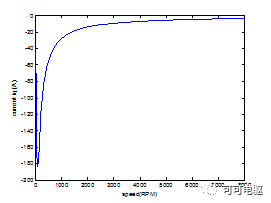
圖3. ASC狀態下Iq電流仿真曲線
ASC工作狀態時,不同轉速下,電機輸出扭矩在低速區隨著轉速升高而急速增大,后隨著轉速升高而急速減小,高速區趨于穩定,如圖4所示。
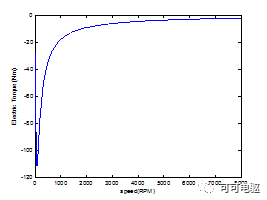
圖4. ASC狀態下電機制動力矩仿真曲線
主動短路ASC****時,電驅系統的特性:
低速區產生顯著的制動力矩;
反電動勢產生的持續電流可能會引起電機過熱;
電機過熱導致轉子磁鋼退磁風險;
電機過熱引起逆變器過熱,導致逆變器損壞;
2. 開路工作狀態:OC
開路保護工作狀態又叫OC(open circuit)或Freewheeling,以電驅系統搭載三相IGBT功率模塊為例,通過開通IGBT上橋臂和下橋臂所有的管,逆變器進入被動整流的狀態,即為開路保護,如圖5所示。
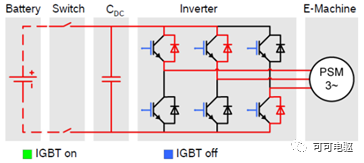
圖5.開路時IGBT的工作狀態
當電機運行在高轉速區,如果進入開路保護工作狀態,則電機產生的反電動勢高于母線電壓,經過續流二極管向高壓電池整流回饋,形成閉合回路,如圖5所示,此時電機端產生較大制動轉矩。同時,這種不可控的被動整流使得電機反電動勢對掛在直流母線上的器件,例如:母線電容、IGBT等,產生較大沖擊危害。
當電機運行在低轉速區,如果進入開路保護工作狀態,則電機產生的反電動勢低于母線電壓,無法經過續流二極管向高壓電池整流回饋,也就無法形成閉合回路,此時電機端空載運行。此時,電機反電動勢對掛在直流母線上的器件不會產生沖擊危害。
開路保護OC 時,電驅系統的特性 :
高速區相電流流過續流二極管;
高速區高反電動勢給母線上器件帶來沖擊危害;
高速區電機輸出端產生非預期的大制動力矩;
低速區電機輸出端只存在軸承等摩擦力矩。
3. 0-torque控制工作狀態
0-torque控制顧名思義就是逆變器進入0Nm控制狀態,即電機輸出扭矩為0Nm。然而,0-torque控制工作狀態的前提條件是:高壓、低壓供電正常,電驅系統能執行0Nm輸出。
4. 安全保護策略:ASC、OC、0-torque的選擇機制
汽車功能安全標準ISO26262嚴格要求:電驅動系統以及整車其他系統(如:電池、DCDC、充電器、整車VCU等)出現故障時,電機控制器接受到故障,并做出及時響應,進入安全工作狀態,以便電驅動運行在適當的工作狀態,避免人員遭受傷害,同時,也盡可能免電驅系統再次破壞。電驅系統在安全工作狀態運行時,需規避以下事件的發生:
避免整車出現無目的扭矩和車速輸出造成人員傷亡;
避免過高的反電動勢或高電池包電壓輸出造成人員傷亡;
避免過高的反電動勢對掛在母線上各器件(如:IGBT、DC電容等)的損壞;
避免過高的溫度造成逆變器的損壞或轉子磁鋼退磁;
等等……..
通過分析電驅動系統安全工作狀態:ASC、OC的特性,可大致按下述機制來進入安全工作狀態,如圖6所示:
當母線電壓足夠大時,則考慮進入開路保護工作狀態OC;
當母線電壓不夠大,存在反電勢反超母線電壓現象時,則考慮在低速區進入開路保護工作狀態OC,高速區進入主動短路保護工作狀態ASC。因此,低速區采用OC避免采用ASC產生大的制動力給車輛運行造成大沖擊,而影響駕駛舒適性;高速區采用ASC避免采用OC產生大的反電動勢給母線上器件帶來沖擊危害。
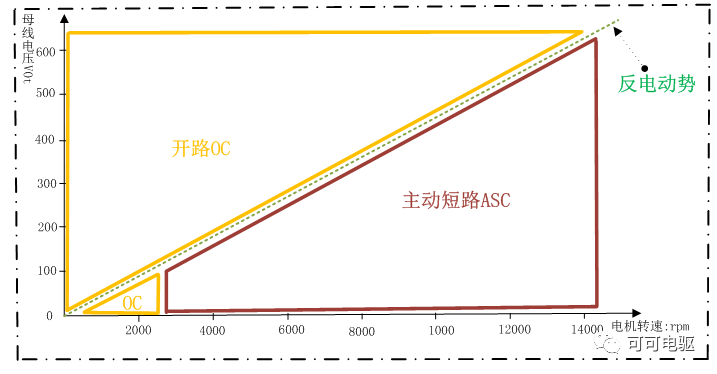
圖6.安全工作狀態選擇機制一
考慮到主動短路工作狀態容易造成電機或逆變器過熱,可在高速區設計主動短路和0-torque控制相結合的方式來調節安全工作狀態,如圖7所示,當0-torque控制引入時,還需要考慮功能安全標準ISO26262的話,則整個安全工作狀態選擇機制的控制系統將需設計得更復雜:在故障發生時,不僅需要實時監控0-torque控制是否能正常執行,還需監控0-torque控制的路徑不會引起無目的地扭矩輸出,對于容錯時間間隔(FTTI)的控制也是個嚴峻的挑戰。
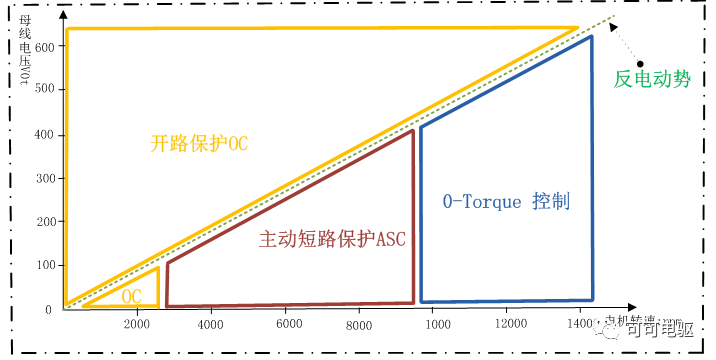
圖7.安全工作狀態選擇機制二
整車系統或電驅系統出現故障影響到駕駛安全性時,基于高壓功能安全考慮,整車系統會第一時間斷開高壓繼電器,禁止電池高壓輸出,避免故障發生時高壓電源還在輸出造成人員危險,此時也就無法執行0-Torque控制。
相對而言,OC和ASC的實現就更簡單、更快速。無論何種系統故障或硬件故障的發生,逆變器硬件層面都可通過器件或電路相互監控達到OC和ASC快速實現和切換。因此,為了追求簡單、高效,當前大部電驅系統開采用了如圖6所示的安全工作狀態選擇機制一,當然,少部分供應商采用ASC與0-torque控制相結合的方式,如圖7所示安全工作狀態選擇機制二。
基于系統架構、軟件架構以及硬件架構,觸發安全工作狀態,不同的故障,需要結合故障發生的時間、發生的位置以及功能安全等信息,來選擇軟件層面或硬件層面觸發對應的安全工作狀態。
5. 拖車保護應用
車輛發生故障或某些特殊情況時,需驅動輪著地被臨時拖車,當電動汽車驅動電機與傳動軸間沒有脫離裝置時,則電機將產生反電勢。此時,我們就需要考慮電動車在臨時被拖車時的安全工作狀態:
若將電驅系統進入OC模式,則存在反電動勢對電機控制器開關管、母線電容及其它器件形成安全威脅;
若將電驅系統進入ASC模式,則反電勢電能通過電機定子繞組釋放,有效起到保護用電器安全,但也存在低速拖車時制動力矩大、高速拖車時間長導致過熱的風險。
正所謂:兩害取其輕,故電動車在臨時被拖車時往往將電驅系統進入ASC模式。購買了新能源電動汽車的朋友會發現電動車使用說明書標注:不允許驅動輪著地拖車,如圖8所示,必要時,可允許短距離、短時間的情況下保持低車速(如5km/h)的牽引拖動,就是因為被拖車時電驅系統進入了ASC工作狀態。另外,有人可能會提出0-torque控制用于臨時拖車,但往往是車輛出現了故障才要求臨時拖車,正如前面提到:基于功能安全考慮,故障發生后母線電壓是斷開的,導致無法實現0-torque控制。
特殊情況下,如電池電量低,找不到備用電,需要臨時拖車搶援,可實現驅動輪著地牽引電動車,具體操作如下:被牽引電動車輛必須掛入D擋,并踩壓油門踏板保持一定的行程。這樣的操作是模擬被牽引車輛的電驅系統進入發電模式的運行工況,前提是車輛動力/控制系統能正常工作,牽引速度可達到較高車速,如45千米每小時,被牽引的車輛相當于在充電。
上一篇:儲能革命將至?鈉電三大技術...
下一篇:聊一聊電機直接進入主動短路...
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.siyutn.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-06

2025-05-19

2025-04-30

2025-04-11

2025-04-08

2025-03-31












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號